2021/4/29 (更新日:2021/5/2)
動力源がエンジンとモーターのハイブリッドが燃費が良くて地球に優しい乗り物である原理をお話します【SDG’s】
なぜハイブリッドは燃費が良くて地球に優しいのでしょうか?
動力源をエンジンとモーターの2つ持つことで、お互いの苦手な領域をカバーできるからです。今回はハイブリッドの基本的な原理について復習いたします。
筆者は、長年ハイブリッドの開発に携わってきていますので実感として説明いたします。
ハイブリッドの原理が理解できれば、ドライバーならもっと楽しく運転できるし、技術者ならシステムの視点でハイブリッドの開発ができるようになりますよ。
目次
1. ハイブリッドの構成
2. ハイブリッドの動力源特性
3. ハイブリッドの基本的な考え方
4. まとめ
動力源がエンジンとモーターのハイブリッドが燃費が良くて地球に優しい乗り物である原理をお話します【SDG’s】

1. ハイブリッドの構成
エンジンとモーターの2種類の動力源を持つハイブリッド自動車についてお話します。
ハイブリッドを制御する目的は、燃費を良くすることです。
燃料消費が減ることでCO2の排出も減らすことができ、地球にも少しやさしい。
代表的なシステム(パラレル方式)で、ハイブリッドに共通する原理を中心に説明します。
システムには(シリーズ方式、パラレル方式、シリーズパラレル方式)がありますが、今回はその区別には触れません。
システムについては、以下の記事を参照ください。
エンジンとモーターを動力源に持つハイブリッド自動車の代表的な3つのシステム構成と動作をお話します。【SDGs】
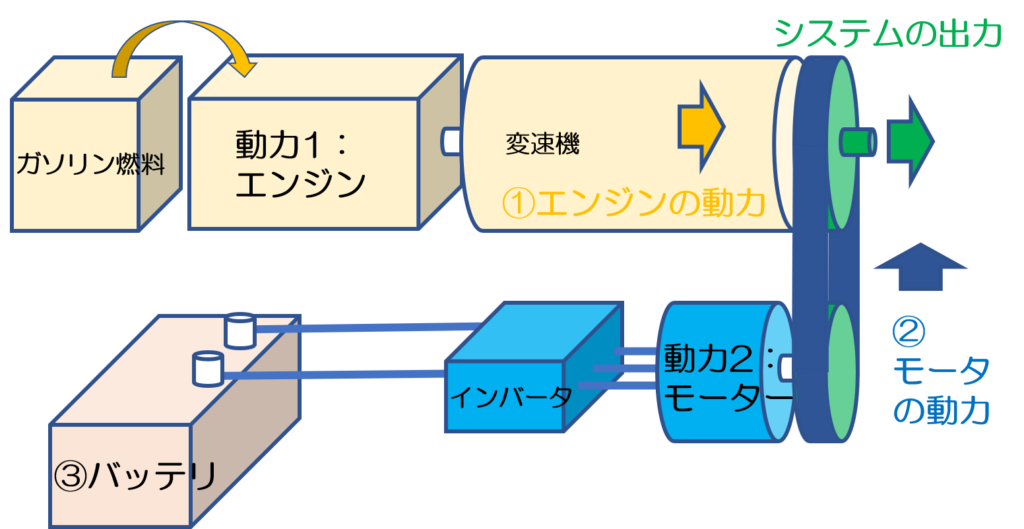
構成は、
ハイブリッドの動力源
動力1:エンジン系(黄色)
動力2:モーター系(青色)
w/インバータ
エネルギーを一時溜める
蓄電:バッテリ
エネルギーの流れは、
システムの出力は、
①エンジンの動力と、
②モータの動力を
加えたり減らしたりする。
*モータの動力の位置は、状況により変速機の前/後に変わります。
2. ハイブリッドの動力源特性
ハイブリッドシステムとして性能が向上するよう制御するには、性質の異なる2種類の動力源の特性を理解することが重要です。
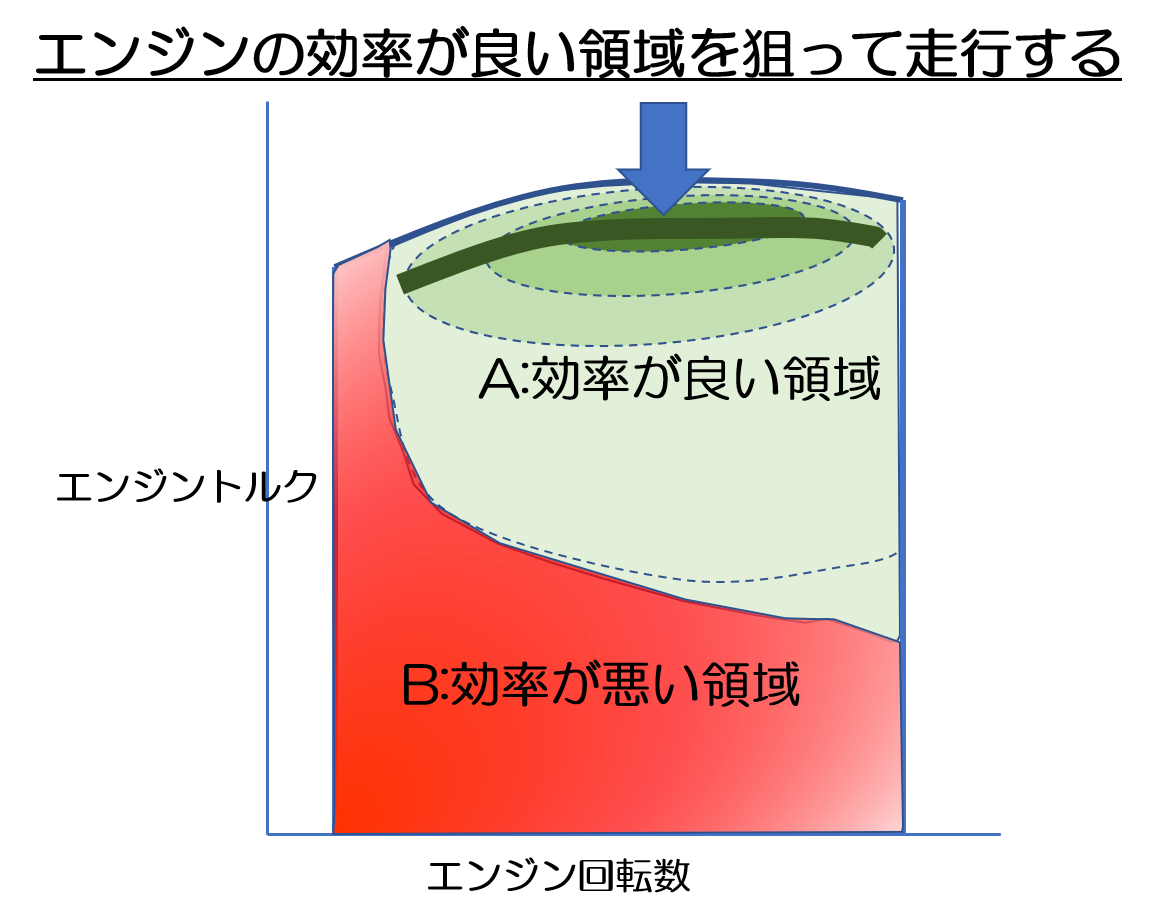
2-1. エンジン特性
(縦軸:エンジントルク × 横軸:エンジン回転数)

「一般のエンジン効率特性」
A:効率の良い領域(緑)
◎無駄に燃料を消費しない
△最高効率:40%~50%(理論上の限界と言われる)
B:効率が悪い領域(赤)
△燃料の消費が多い
△動力に伝わる量が少ない
アイドリング回転数
✕停車しているときのエンジン回転数
✕エンジンが回るだけに燃料消費
✕動力を発生していない
B:効率が悪い領域が広い。
アイドリング回転数で無駄に燃料を消費している。
燃料消費が少ないエンジンの使い方が燃費向上につながる。
2-2. モーター特性 w/インバータ
(縦軸:モータートルク × 横軸:モーター回転数)
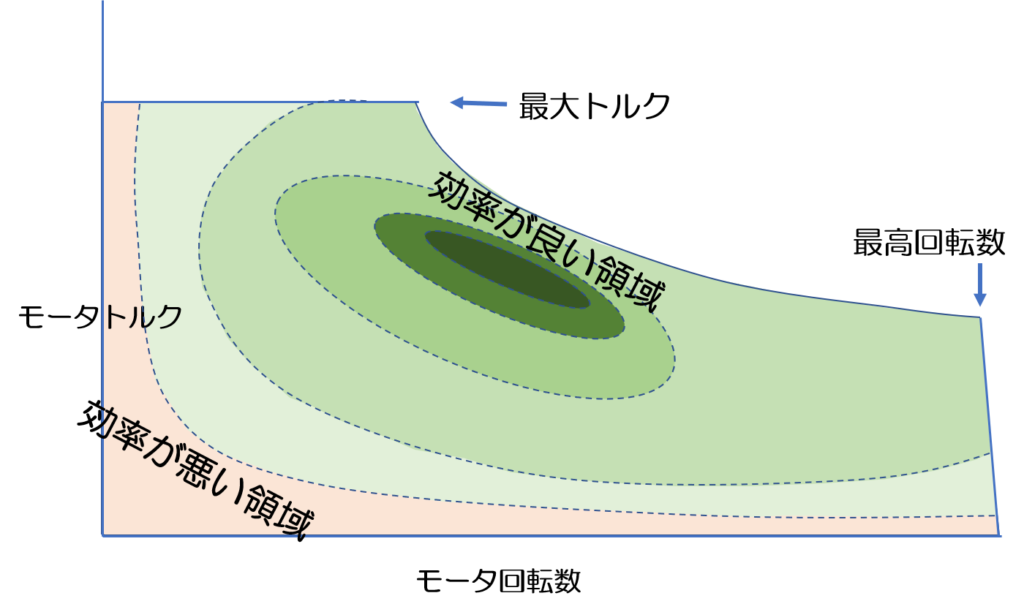
「一般のモーター効率特性」
インバータを含む
効率が良い領域(緑)
◎通常の使用領域
◎最高効率:90%程度
効率が悪い領域(赤)
△エンジンよりまし
△悪い領域が少ない
不連続な領域がない
◎0~最高回転まで連続
全体的に効率が良いので、エンジンの効率の悪い領域に使いたい。
零回転から連続して使えるので、車の挙動をコントロールしやすい。
2-3. バッテリ
重量エネルギー密度比較
| 【エネルギー源】 | 【重量エネルギー密度】 |
| リチウムイオン電池 | 約662Wh/kg (理論限界値) |
| ガソリン | 12000Wh/kg以上 |
「溜められるエネルギー量 / 重量」
バッテリ ≪ ガソリン
バッテリに溜められるエネルギーはガソリンの(1/20)
バッテリは一時的にエネルギーを溜めるのに適している。
ガソリンで動くエンジンは長時間の使用ができる。
バッテリに溜められる電気で動くモータは短時間の使用に向いている。
3. ハイブリッドの基本的な考え方
3-1. 使わないときはエネルギーを消費しない

問題:渋滞で停車しているのに、エンジンがアイドリング回転で回っていて燃料を消費する。
対策:アイドリングストップ
エンジンを停止し燃料節約
課題:発進毎に頻繁にエンジンが掛かり不快
⇒低速はモーターで走る
(3-2を参照)
3-2. 効率の良い運転をする
(1)エンジン効率の悪い領域はエンジンを停止しEV走行

問題:エンジンの効率が悪い領域で走行すると燃費が悪くなる
対策:効率の良いモーターで走行する(EV走行)と消費が抑えられる
⇒赤点線内をモータ走行
課題:バッテリの容量には限りが有り永遠にEV走行できない
⇒そのときはエンジンで走行する。
モータで発電しバッテリを充電しながら、エンジン出力を上げ極力エンジンを効率の良い領域で使用する
(メリットがあれば行なう)
(2)エンジン効率の良い動作点で走行
問題:エンジンで走行する領域で燃費を向上させる領域が残っている。
対策:極力エンジンを効率の良い領域を狙ってで使用するようにモータでアシストする。
課題:バッテリ状態によりモータのアシストができない場合がある。
⇒バッテリ状態を検出するロジックをいれて、バッテリ状態に合わせてモータ制御をおこなう。
3-3. 捨てていたエネルギーを回収する

問題:ブレーキ(車を止める)をするとき、車のエネルギーを熱で捨てている。
対策:車のエネルギーをモータで発電してバッテリに充電する。エネルギーを回収する。
課題:バッテリがいっぱいに充電されていると、ブレーキのエネルギーを受け入れられない。
車を止められない?
⇒最低限の機械式のブレーキ力は残し安全性能を確保する。
3-4. 余ったエネルギーを蓄電してリサイクルする
上半分:走行したときのエネルギーの流れと、
下半分:簡単な車が走るモードを対比させて表現しました。
ポイントは、回生したエネルギーをバッテリに蓄電して有効にリサイクルすることです。
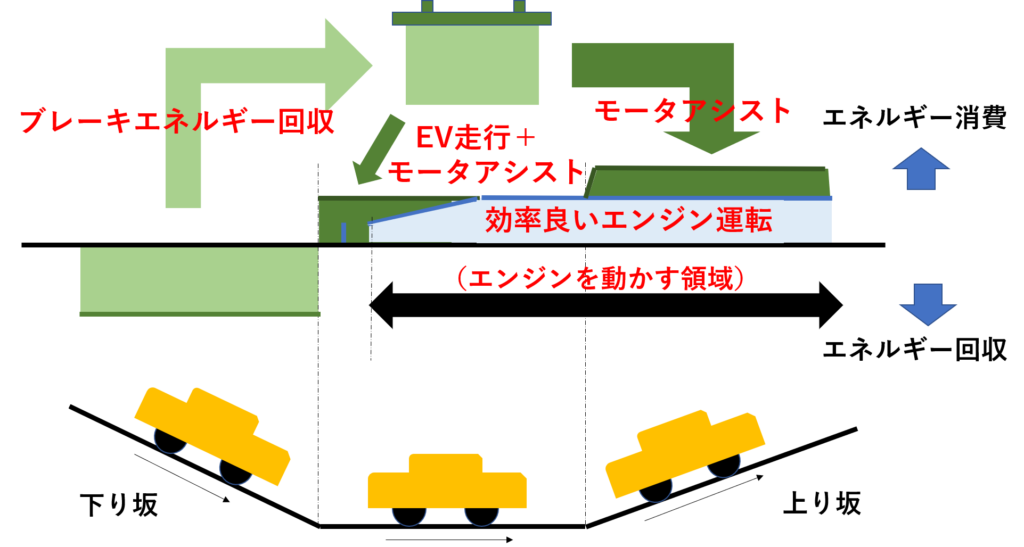
下り坂では、ブレーキでエネルギーを回収して、バッテリに充電します。
平坦路では、走り始めはエンジンをかけずに電気でEV走行します。
エンジン指導後はシステムの効率が良くなるようにモータアシストしながら走行します。
上り坂では、主にエンジンで走行しながら不足分をモーターでアシストします。
代表的な状況を切り出し説明しています。
実情に応じて制御が変わりますが、システムの効率が向上するように動作します。
4. まとめ
ハイブリッドの燃費が良くて地球に優しい理由を説明しました。
最後まで読んでいただきありがとうございます。
極力わかりやすい表現を心がけました。
しかし言葉での表現が難しく適切ではないところがあるかもしれません。
足りない部分補足などが有りましたらご指摘等お願いいたします。
Copyright–Seiji Nakamura, 2021 All Rights Reserved.