2020/8/7 (更新日:2023/9/13)
電気自動車を作るために電気部品の設計をします。【電気自動車の主要電気部品の仕様】

電気自動車の主要な電気部品の仕様をどう決まるかわかりますか?
電気自動車の部品のモータ、インバータ、電池の仕様をどう決めるか具体的に説明します。
車両の性能を元に部品の仕様を導きます。
長年実際に電気自動車を設計するときに使ってきた考え方です。
応用して電気自動車を設計してみてください。
1.電気自動車を作るために主要電気部品の設計をします。
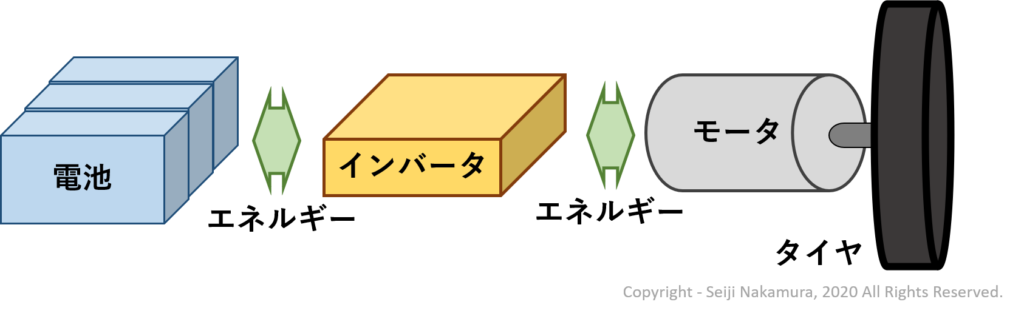
電気自動車の駆動に関わる電機系システムは、
駆動用のエネルギーを蓄える「駆動用の電池」、
タイヤに走る力を伝える「駆動用モーター」、
電池のエネルギーをモーターが回る力にエネルギー変換する「インバータ」
から構成されています。
電機系システムを設計する為に初めにすることは、
上記の“電気自動車の性能曲線”をタイヤから路面に加わるインプット・アウトプットの“力・エネルギーで表現”する
ことです。
先回説明した電気自動車の性能曲線を決めよう【モータ出力を設計する為に】を元に、今回は、電気自動車の動力源となるモーターに必要な駆動力の要求値を計算により求めます。
2.電気自動車の主要部品を速度・加速度・駆動力から解析

電気自動車の主要部品の仕様をすぐに知りたい方は、次項3.を御覧ください。
車両運動方程式が理解できている方は、この項は無視してください。
前提の車両の駆動力に関する計算式を説明しておきます。
車が走るのに使われる駆動力:Fは、車が走るのを邪魔する力:Fr(車両走行抵抗)と常に釣り合った状態を保ちます。
F(車が走る力) = Fr(走るのを邪魔する力)
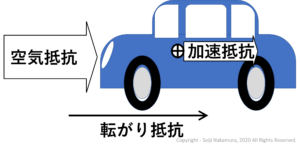
(1)走るのを邪魔する力Fr(車両走行抵抗)は、
空気が前面を抑えて車を止めようとする空気抵抗:FL、
タイヤと路面が接触することで生じる転がり抵抗:FR0、
斜面を登る時に重力が押し戻そうとする勾配抵抗:FSt、
車両を加速する為の慣性抵抗Faで成り立っています。
F = Fr(車両走行抵抗) = FL(空気抵抗) + FR0(転がり抵抗) + FSt(勾配抵抗) + Fa(加速抵抗)

以下に、走行抵抗の計算式を示しますが、詳細に興味ある方は技術書を参照ください。
(2)空気抵抗は、
空気の密度をρ[kg/m3]、空気抵抗係数をCd、全面投影面積をA[m2]、車両速度をV[m/sec]、逆風の速度Vo[m/sec]とすると、
FL = (1 / 2) ×ρ× Cd ×A ×(V + Vo)2
(3)転がり抵抗は、
車両重量をm[kg]、重力加速度をg[m/sec2] = 9.81、転がり抵抗係数をfとすると、
FR0 = f ×m ×g
(4)勾配抵抗は、
勾配角度をα[度] とすると、
FSt = m ×g ×sin α
(5)加速抵抗は、
加速度をa[m/sec2]、車両全体の慣性モーメントI [kg m2]: 回転・加速のための重量増加分、タイヤ半径 r [m]とすると、
Fa = (m ×g + g ×I / r2 ) ×a / g = (m + I / r2) ×a
(6)まとめると、
F = Fd – { f ×m ×g + (1 / 2) ×ρ ×Cd ×A ×(V + Vo)2 + m ×g ×sin α +(m + I / r2) ×a } [N]
但し、内部の抵抗損失は理想状態として無視しています。
自動車の運動方程式に関しては色々な書籍がありますが、知りたいことをダイレクトに答えてくれるものがなかなかありません。
自動車に関して結論だけを明確に答えてくれる自動車技術会の書籍を、私は参照しています。
私にとっては頼りになります。
今回自動車の運動方程式について確認しました。
技術的に信頼できる情報を整理してまとめてあります。
色々な分野があります。
3.電気自動車の主要部品を車両性能曲線で表現

車両性能を電気自動車の主要部品に変換する部分です。
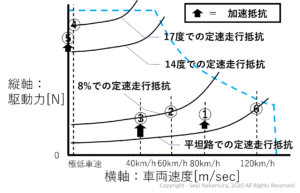
次に、【車両速度[m/s] – 駆動力[N]】面上に、
電気自動車の性能曲線の目標値と、
それを満たすタイヤから路面に伝える駆動力の動作ポイントを
対比して示します。(後進についても同様です。)
結論として、①~⑥の動作点を満たす駆動力が必要になります。
①平坦路での定常走行車速(80km/h)、追い越し加速度(0.05G)
②高速道路・一般道を想定した長い昇り勾配の坂での定常走行車速 (60km/h @8%)
③高速道路ランプウエーで本線への流入時の初期車速(40km/h)、 流入車速(80km/h)、加速距離(100m)
④急坂路(斜度17度)での極低速走行車速
⑤急坂路(斜度14度)での発進可能のこと
⑥平坦路での最高速度(120km/h)
要求の性能
Gは標準重力加速度(1G = 9.80665m/sec2)
この様な物理計算は車両の運動モデルをMatlab/Simulinkで表現し解析すると理解し易く簡易に答えを求められます。
Matlab/Simulinkによる駆動力の求め方は、次回以降の「車両運動モデル化から駆動力評価」を参照ください。
4.電気自動車の主要部品を駆動力と関連付け

電気自動車の部品スペックを決める手順:モータトルクから電池・インバータへ
(1)タイヤにつながっているモーターの動作ポイントを求める。
駆動用のモーターの駆動力はギヤ(減速機・変速機など)を介してタイヤに動力を伝達しています。
従って2.で求めた動作点は、車両諸元にある車両の減速比・変速比などから容易に求められます。
ここで求めた動作点が、モーターに必要な要求値です。
最終的にトルクの余裕を持って図中の青の点線の範囲以下がモーター仕様となります。
Tmot = F ×r / gr
モータートルク:Tmot[Nm]、タイヤ半径 r [m]、総減速比 gr、伝達効率無視
(2)モーター仕様を満たす範囲で電池・インバータ・モーターを設計します。

とはいうものの、電機システムとしてバランスを考慮して、電池・モーターの電圧を決める必要があります。
電圧の違いにより流れる電流値が変化し耐圧、素子数、電線径、損失、体格、コスト、昇圧コンバータ要否、部品の入手可否など多くの項目に影響がでます。
技術的な優位性・購買力を含めた会社を取り巻く環境などからシステムとして優先順位を決めて電圧値は設計する必要があります。
電池は、容量については一充電走行距離から算出して決めます。
電気のパワー系のシステムは一律には決められないので、具体的な条件がそろった時点でお話が出来ればと思っています。
*自動車技術全般の技術書紹介
自動車メーカーの技術者が多く持っているいざという時に役に立つ書籍です。
最後に
電動搬送車・電動車椅子・電気自動車を作りたい人に向けて
今は誰でも造る気が有りさえすれば電気自動車は作れる時代です。
しかし悔しいですがどこかを妥協して誰かに試作をお願いするのが現実です。
電気自動車を作るおおまかな道筋を示していきます。
電気自動車を作るため主要な電気部品のモータとインバータと電池の仕様を決める必要があります。
先回説明した電気自動車の性能曲線を決めよう【モータ出力を設計する為に】を元に、電気自動車の主要部品の仕様を具体化する手順を説明します。
コラム
- 第1話:電気自動車の性能曲線を決めよう【モータ出力を設計する為に】
- 第2話:電気自動車の電気部品を設計します【主要電気部品の仕様】:今回説明
- 第3話:電気自動車を制御する仕組みを定義します【モデル化の準備】
- 第4話:電気自動車の制御ロジック(モデル化)の設計手順
- 第5話:電気自動車の制御をモデル化してシミュレーション評価
電動車両の開発に長年携わってきた経験があり、実際に自分で設計し電気自動車を試作した経験から説明します。
読む方が開発の全体の流れを理解することで、周囲の開発者から必要な情報を引き出すきっかけとなることを考えています。
電動搬送車、電動車椅子などの開発に応用して、少しでも使い勝手が良く思い通りに近づいたものが出来ることを望んでいます。
*最後までご覧頂きありがとうございます。
言葉足らずの部分はお許しください。
また、改善項目・修正項目がございましたらご指摘いただけたら幸いです。
* 技術コンサルティングをご希望の場合は下記を参照ください。
【 電気自動車車両制御ロジック開発のコンサルティング依頼ページ 】
海外にも対応します
Copyright – Seiji Nakamura, 2021 All Rights Reserved.