2020/8/10 (更新日:2023/9/15)
電気自動車を制御するために車両の動きをブロック図で理解!【ブロック図とシーケンス図で動きを分解】

電気自動車の動きと制御の関係を理解するのは難しいですね!
電気自動車の動きをブロック図、シーケンス図で分解します。
電気自動車の制御部と機械部分をブロック図に分解し、制御したときの車両の動きをシーケンス図で説明していきます。
ドライバーから道路へ力が伝わるまでの仕組みを分解すると、制御ロジックを考え易くなります。
制御ロジックを考える手法は多々ありますが決まったものはありません。
ここでは、初心者にも理解しやすいと思う方法の一つを紹介します。
内容的には少し難しいと思いますが、概念をご理解ください。
業務でMATLAB/simulinkを使って車両&車両制御モデルを構築し動作のシミュレーションを業務でおこなっていた経験から説明します。
目次
1.電気自動車を制御するために車両の動きをブロック図で理解
2.電気自動車と環境の概要をブロック図で表現
3.電気自動車と環境をブロック図とシーケンス図でブレークダウン
4.制御対象の電気自動車をブロック図で分解し表現
5.電気自動車を制御する仕組みをブロック図とシーケンス図で表現
6.電気自動車の車両制御ECUをブロック図で表現
1.電気自動車を制御するために車両の動きをブロック図で理解
ドライバーの運転動作から始まり、自動車のタイヤの力が道路に伝わるまでの仕組みをブロック図を使い分解します。
ブロック図

STEP1: ユースケース図でドライバーの操作に対する電気自動車の使われ方を定義します。
「車外情報をドライバーは取り込み、電気自動車の運転動作を行い、その結果車両が走行する。」一連のフローです。
STEP2: ドライバー、電気自動車、路面という大きな構成要素をブロック図でとらえます。
シーケンス図でブロック間の動きが時間経過でどのように変化しているか分析します。
シーケンス図
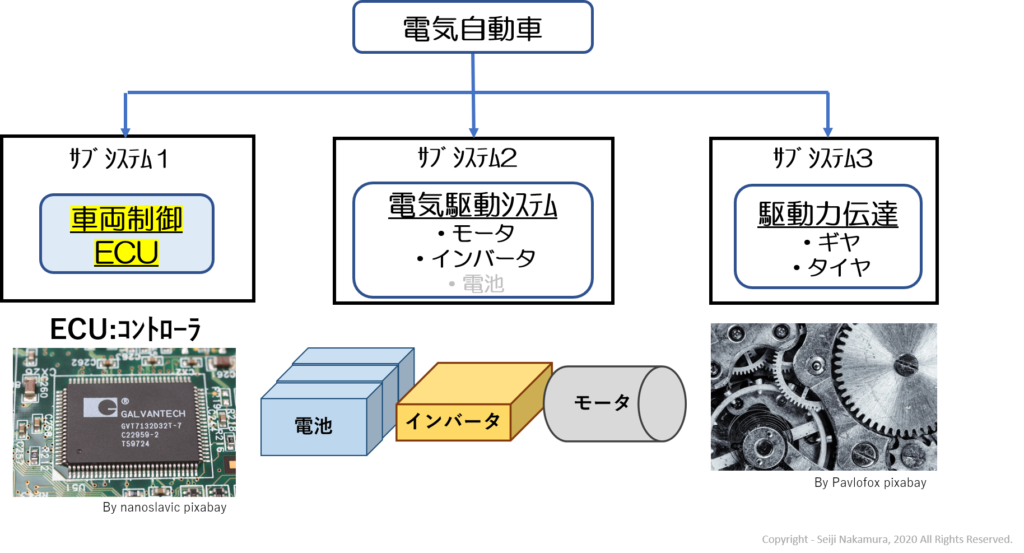
STEP3: 電気自動車自体を
- 車両制御ECU
- 電気駆動システム
- 駆動力伝達機構
に分解し電気自動車をブロック図で表現します。
STEP4: 電気自動車のブロック図を用いて要素間の動きをシーケンス図で表現します。
ほぼ全体の動きが把握できます。
STEP5: 電気自動車のブロック図で車両制御ECUを中心に、信号の流れ、インターフェイスを明確にします。
電気自動車システムブロック図

この時点で、制御対象と車両制御ECUの関係が理解できると思いますので、制御ロジックの検討に移行できます。
*制御検討に興味がある場合は、こちらを参照ください。
2.電気自動車と環境の概要をブロック図で表現
電気自動車の制御を考える前に、ユーザー目線で何ができるかを明確にしています。
ユースケース図で、電気自動車が走行するシステムについて関係の前提を明確にしています。
電気自動車の走る・止まる(前後方向)に限定して「ドライバーの運転動作・電気自動車・道路への力」の関係をブレークダウンしていきます。
* 曲がる(左右方向)はハンドル操作を想定している為、制御の必要はありません。
ユースケース図(下図)で明確にしている内容は、
- ドライバーには社外情報がインプットされ運転動作をおこないます。
- 道路・路面に電気自動車のアウトプット(ここでは駆動力)が伝わります。
- 車両は電気自動車で、前後方向の移動に限定したシステムになります。
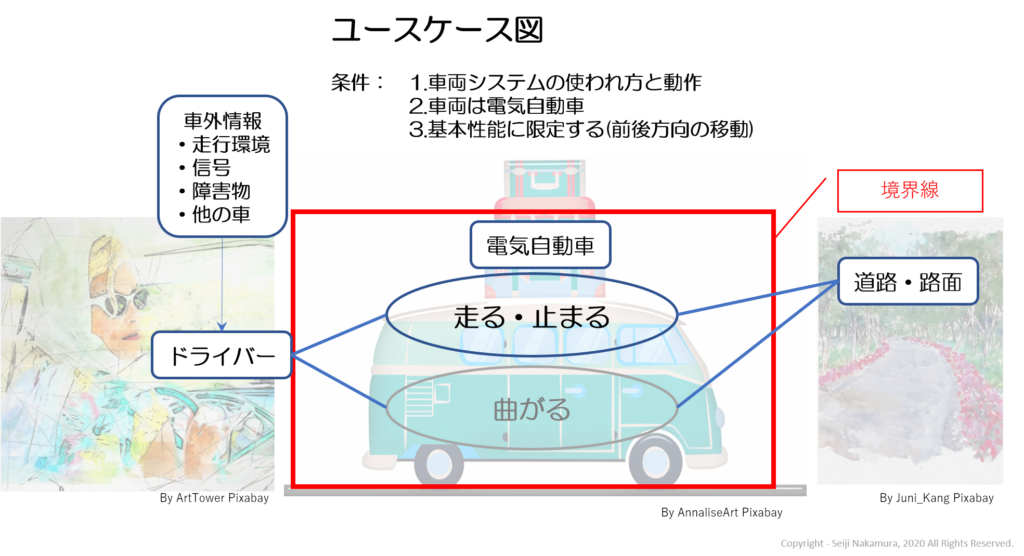
前提条件を明確にしてから少しづつ具体化していきます。
3.電気自動車と環境をブロック図とシーケンス図でブレークダウン
電気自動車のシステムのブロック図
ドライバー・電気自動車・路面の関係を分解してブロック図で表現します。
ブロック図では、インターフェースとブロック間の信号が明確に定義されます。
ブロック図
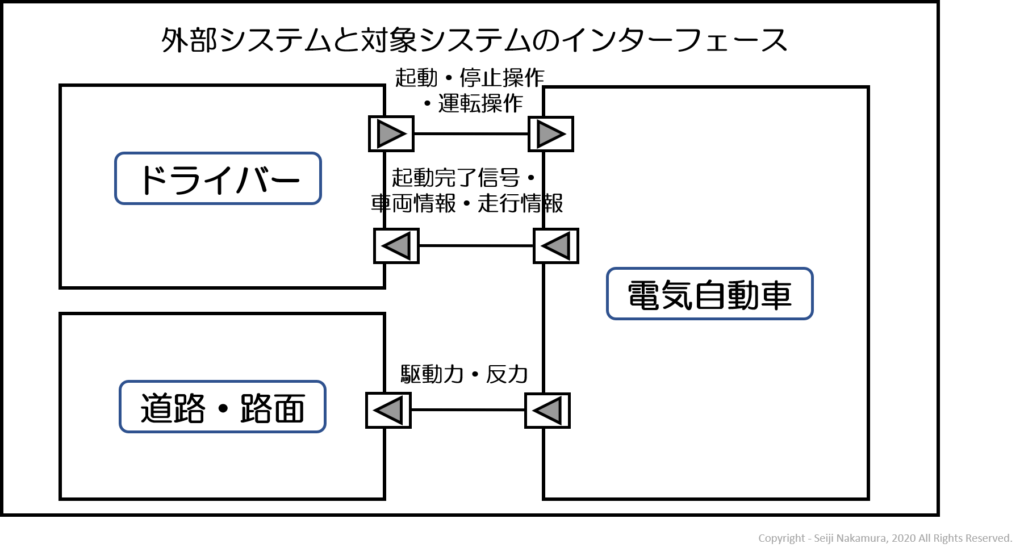
- ドライバーから電気自動車へは運転動作がインプットとされ、
- 電気自動車からドライバーへは車両の状態がフィードバックされます。
- 上記の結果、電気自動車から道路・路面へ駆動力がアウトプットされます。
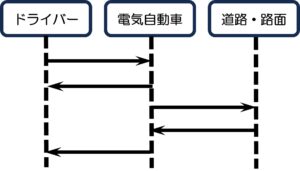
電気自動車のシステムのシーケンス図
ブロック間の状態の時間変化をシーケンス図で表現します。
上部から下に移行するに従い時間の経過を表しています。
シーケンス図
システムの時系列の動き
- ドライバーの起動操作が車両挙動の引き金になり、
- 路面に電気自動車から駆動力が伝達されて、
- 車両の挙動(前進か後進)が発生する。
- ドライバーが停止動作をすれば、車両が停止する。
までの状況が分かります。
4.制御対象の電気自動車をブロック図で分解し表現
制御を理解する為に、電気自動車を分解してブロック図で表現します。
- 車両制御ECU:制御を担当する部分=今後検討していく重要な部分
- 電機駆動システム:電気系の駆動力を発生する部分
- 駆動力伝達:ギヤなどの路面に駆動力を伝達する部分
*電気駆動システムのモータ・インバータが制御対象になります。
電気自動車のシステムのブロック図が明確になったので、次章でいよいよ詳細の検討おこないます。
5.電気自動車を制御する仕組みをブロック図とシーケンス図で表現
分解した各々の関係を、信号で表した【ブロック図】と、主に動きで表した【シーケンス図】で示します。
制御をおこなう【車両制御ECU】の部分を中心に今後は検討することになります。
この二つの図からは、上述した様に、起動操作から駆動力を発生してするまでを分解して理解できます。
少し複雑です。
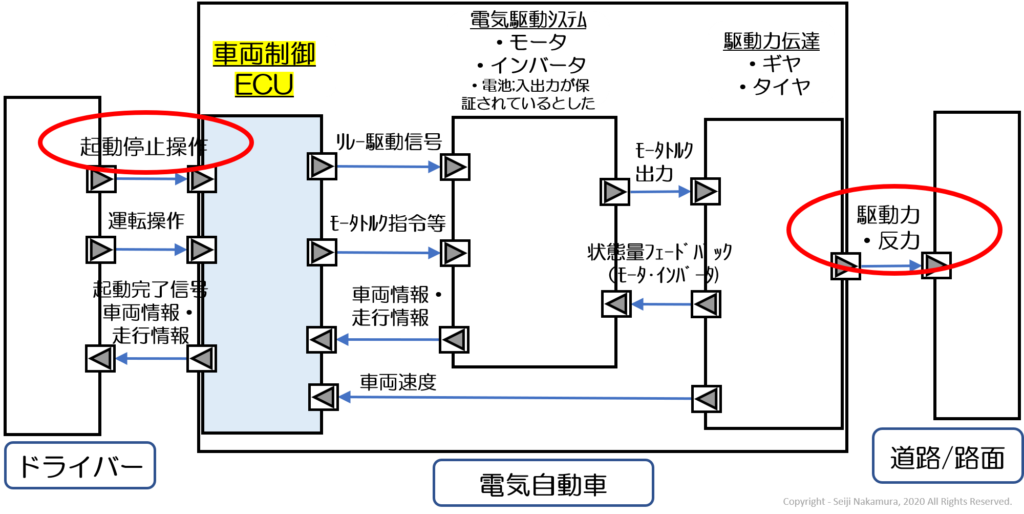
電気自動車のシステムのブロック図
電気自動車のシステムのブロック図では、ブロック間のインターフェースと信号が明確になります。
繰り返しになりますが、ドライバーからの「起動停止操作」の信号が、電気自動車の車両制御ECUに入力されるのがすべてを開始するキッカケとなります。
最終的には、電気自動車のタイヤから道路・路面に駆動力がアウトプットされることで電気自動車が前進・後進することになります。
結果を電気自動車のシステムのブロック図(下図)に示します。
電気自動車のシステムのブロック図
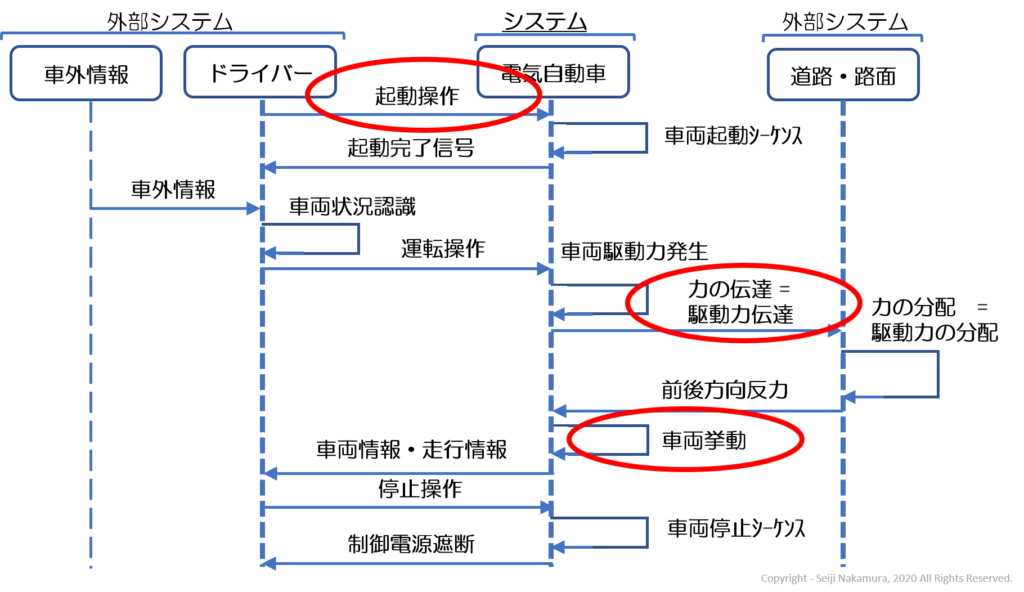
電気自動車のシステムのシーケンス図
電気自動車のシステムのシーケンス図では、状態の時系列変化が理解できます。
ドライバーの起動操作から、車両制御ECU⇒電気駆動システム⇒駆動力伝達間でどのような状態が生じたのか理解できます。
実際の変化は、電気自動車のシステムのシーケンス図(下図)で確認ください。
電気自動車のシステムのシーケンス図

シーケンス図の中に ①起動操作、②運転操作、③停止操作で始まる3つのモードが存在します。
3つの状態はそれぞれ独立していて、状態が遷移することで制御が連続しています。
次回以降で説明する内容は、この3つの状態を詳細に検討した結果になります。
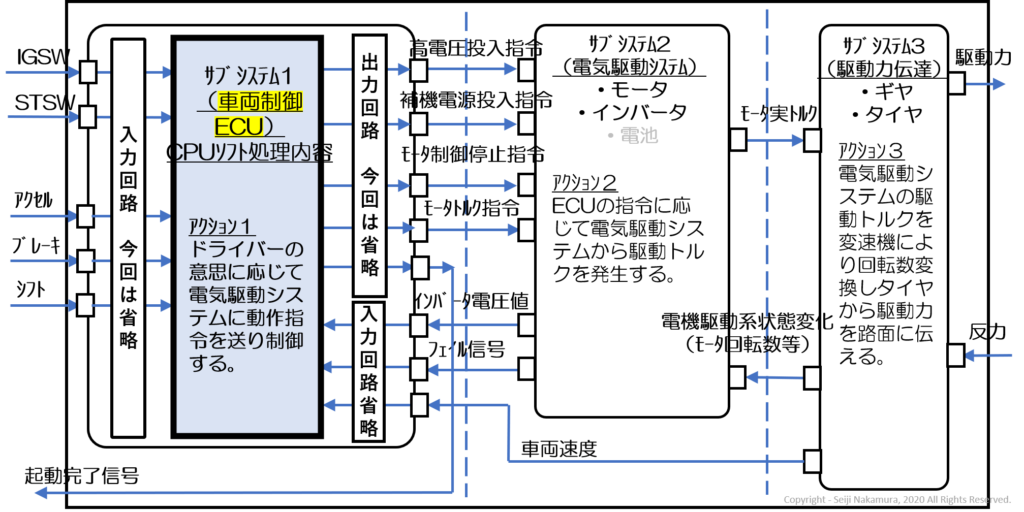
6.電気自動車の車両制御ECUをブロック図で表現
今までの内容を電気自動車のブロック図で整理します。
ここでは、次回以降で検討する為に、分解した各々のシステム間の信号の流れ、インターフェイスをより詳細に明確にしてあります。
【車両制御ECUのCPUソフト処理内容】の部分に制御内容を織り込むことになります。
電気自動車システム
- 入力信号として、(IGSW,STSW,アクセル,ブレーキ,シフト)が取り込まれ
- 駆動力が出力され、反力が返ってきます
電気自動車システム内
- 車両制御ECUから電気駆動システムへは、高電圧投入指令、補機電源投入指令、モータ制御停止指令、モータトルク指令が
- 電気駆動システムから車両制御ECUへは、インバータ電圧値、フェイル信号がフィードバックされます
- 電気駆動システムから駆動力伝達へは、モータ実トルクが
- 駆動力伝達から電気駆動システムへは、電機駆動系状態変化がフィードバックされます。
電気自動車システムブロック図
システムの要求を「ユースケース図」、「ブロック図」、「シーケンス図」などで、わかり易く仕様にまとめる試みをしました。
「モデルベースシステムエンジニアリング」= 「sys ML」の手法を参考にして作成しました。
「sys ML」について参照した2冊を紹介しておきます。
本記事の考え方を理解するには、ざっと目を通しておくのは助けになります。
高額と思う場合は購入する必要はありません。
実際に私が参照した文献
システムズモデリング言語SysML モデルに基づくシステムズエンジニアリング最後に

車両の制御ロジックを考える為に、電気自動車で定義されている内訳を分離して明確にしました。
①車両制御ECU、②電機駆動システム、③駆動力伝達部のブロック構成です。
シーケンス図では3つの状態からそれぞれの関係が成り立っているのも説明しました。
電動搬送車・電動車椅子・電気自動車を作りたい人に向けて
電気自動車をどのように制御するか理解したいですか?
しかし、車両の基本的な動きと制御との関係は分かり難いですね。
電気自動車を作るおおまかな道筋を示していきます。
電気自動車の制御ロジックが感覚的に理解できるように、今回は説明しました。
次回以降で基本的な電気自動車の制御ロジック(モデル化)の設計手順を案内していきます。
コラム
- 第1話:電気自動車の性能曲線を決めよう【モータ出力を設計する為に】
- 第2話:電気自動車の電気部品を設計します【主要電気部品の仕様】
- 第3話:電気自動車を制御するために車両の動きをブロック図で理解します。:今回説明
- 第4話:電気自動車の制御ロジック(モデル化)の設計手順
- 第5話:電気自動車の制御をモデル化してシミュレーション評価
*最後までご覧頂きありがとうございます。
言葉足らずの部分はお許しください。
また、改善項目・修正項目がございましたらご指摘いただけたら幸いです。
* 技術コンサルティングをご希望の場合は下記を参照ください。
【 電気自動車車両制御ロジック開発のコンサルティング依頼ページ 】
海外にも対応します
Copyright – Seiji Nakamura, 2021 All Rights Reserved.