2020/7/30 (更新日:2023/9/13)
電気自動車を作るためにはじめに車両の性能曲線を決めましょう【モータ出力を設計する為に】

【初めて電気自動車・電動車椅子・電動搬送車を作りたい人に向けて】
今は誰でも造る気が有りさえすれば電気自動車は作れる時代です。
しかし悔しいですがどこかを妥協して何もわからず誰かに試作をお願いするのが現実です。
電気自動車を作るおおまかな道筋を示していきます。
今回は電気自動車を設計する為、性能目標の決め方を説明します。
次回以降で部品(モーター)の仕様を具体化する手順、基本的な電気自動車の制御ロジック(MBD)の設計手順を案内していきます。
コラム
- 第1話:電気自動車の性能曲線を決めよう【モータ出力を設計する為に】:今回説明
- 第2話:電気自動車の電気部品を設計します【主要電気部品の仕様】
- 第3話:電気自動車を制御する仕組みを定義します【モデル化の準備】
- 第4話:電気自動車の制御ロジック(モデル化)の設計手順
- 第5話:電気自動車の制御をモデル化してシミュレーション評価
電動車両の開発に長年携わってきた経験があり、実際に自分で設計し電気自動車を試作した経験から説明します。
読む方が開発の全体の流れを理解することで、周囲の開発者から必要な情報を引き出すきっかけとなることを考えています。
電動搬送車、電動車椅子などの開発に応用して、少しでも使い勝手が良く思い通りに近づいたものが出来ることを望んでいます。
電気自動車を作るためにはじめに車両の性能曲線を決めましょう【モータ出力を設計する為に】
自動車は多くの人が多くの時間をかけて製作する商品です。
一度作ってしまったら簡単には後戻りするのが難しい商品です。
設計をどうするか迷わない為に重要なのが、設計に着手する前に自動車の要求仕様を明確にすることです。
お客様のターゲット、車両の使用条件などから電気自動車の要求仕様を明確にして動力性能を作成します。
設計をする前に、以下の項目は数値として明確にするのが良いでしょう。
電気自動車の性能曲線を決める目標値

乗用車・商用車などの一般的な電気自動車を想定して検討をおこなう。
使い方により目標にする項目・値は変わりますが、個人的に常識的な項目・sample値を提示しています。
(1)電気自動車の性能曲線を決めるための目標設定
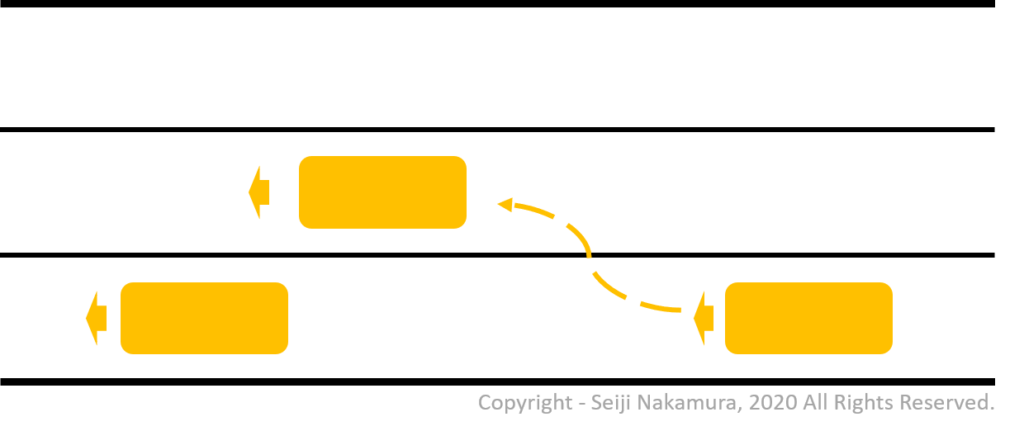
①平坦路での定常走行車速(80km/h)、追い越し加速度(0.05G)
市街地の一般道路・高速道路・山間道路などで交通の流れを妨げない能力を電気自動車は持つ必要があります。
そのために、平坦路で誰もが走行できる定常走行速度から、スムーズに前の車を追い越す能力を電気自動車が持つ必要があると考えています。
②高速道路・一般道を想定した長い昇り勾配の坂での定常走行車速(60km/h @8%)
全国に存在する長い昇り勾配の道路の中で、登り坂が連続している道路を選んでいます。
定常走行ができない場合に車の流れを妨げる恐れがある、”よく利用されている道路″を選んで条件を設定しています。
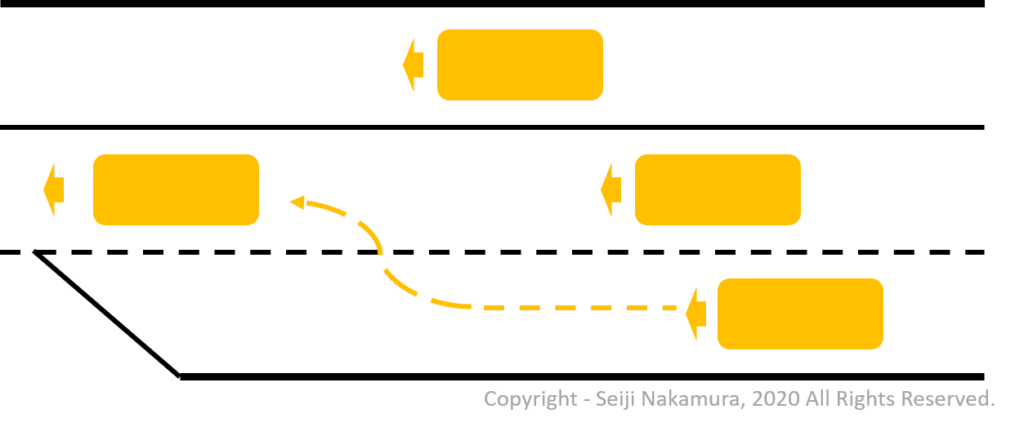
③高速道路ランプウエーで本線への流入時の初期車速(40km/h)、流入車速(80km/h)、加速距離(100m)
一般道から高速道路に入る時に、安全に本流に合流できる能力です。
加速のための路側帯で、高速道路に侵入した時の一般道での速度(40km/h程度)から十分に加速し、本流に合流します。
高速道路を走っている他車の流れを妨げることなく安全に合流する必要があります。
④急坂路(斜度17度)での極低速走行車速
山間地域にある道路や高台に建つ家屋へ続く急な登坂を、電気自動車でも昇れる能力が必要になります。
電気自動車の種類により斜度は適した値にする必要があります。
⑤急坂路(斜度14度)での発進可能のこと
急な坂の途中に店・家などが有る道路では、仕方なく坂の途中で停車する場合が有ります。
そこから発進ができないと不便が生じたり、運転者が不快な気持ちになったりする恐れがあります。
少なくとも発進できる能力は必要になります。
⑥平坦路での最高速度(120km/h)
日本の高速道路の最高速度は現在は100㎞/hです。
一部110km/hへの引き上げも検討されている様です。
通常は登坂、下り坂などの路面の変化も考慮してある程度余裕をもって自動車が持っている最高速度の能力は決めています。
⑦後進;平坦路での最高車速(20km/h)
後進する時の最高車速を規定するものはありません。
ここでは、安全上低車速に設定していますが、前進と同等の車速まで設定できます。
⑧後進;急坂路(斜度 17度)での極低速走行車速
後進も前進と同じだけの登坂性能があることが望まれます。
場合によっては、前進以上の登坂能力を設定する場合もあります。
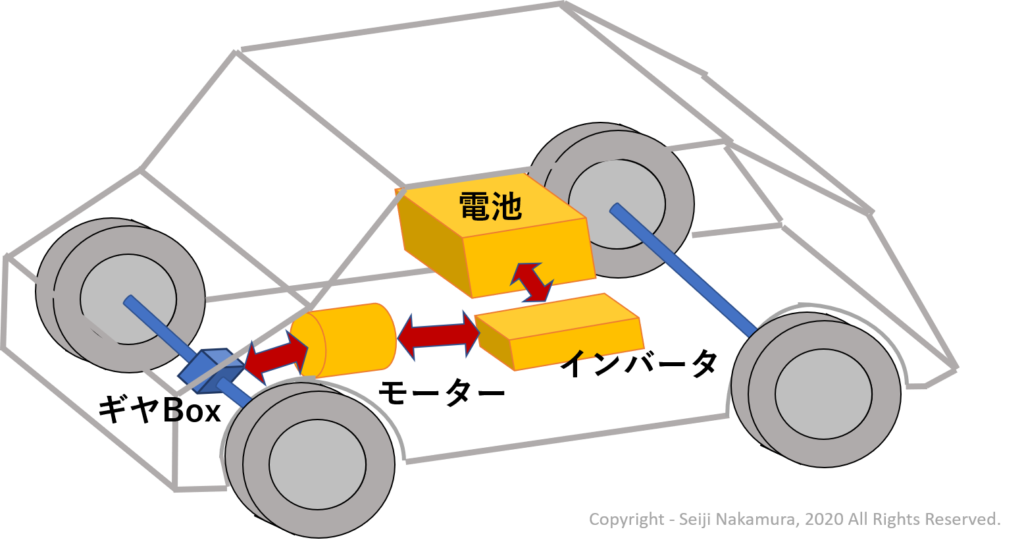
(2)性能曲線からモータ出力を導くための電気自動車の車両諸元等
①電気自動車の基本諸元
変速比・減速比が変わると電気自動車を駆動するモーターの回転数が変わります。
モーターの回転数と体格・重量は関係性が有り、それに伴いインバータも影響を受けます。
ここでは説明できませんが新しく開発する場合は十分検討してください。
- 車両の種類
- 車両総重量(全車両重量+乗員)
- 減速比・変速比
- タイヤ半径・種類
- 各種効率(ギヤ効率・電気系システム効率)他
②一充電距離(50km)、充電時間(5Hr)
車両の目的に応じて走行距離は決めますが、目標距離を長くすると搭載の電池が増えて充電時間が増えます。
また重くなり想定の距離が期待ほど伸びない等の背反もあるので全体のバランスを考えて決めます。
これだけでも、なんだか走っている電気自動車のイメージが語れますね。
(他にも信頼性に関する環境条件:
北米の様な極寒の地域・サハラ砂漠のような灼熱も考えられますが触れません。
走る止まるに直接関係する項目に限り検討していきます。)
最後に
次回は、「部品(モーター)の仕様を具体化する手順」を説明します。
皆様のお役に立っていることを望んでいます。
*最後までご覧頂きありがとうございます。
言葉足らずの部分はお許しください。
また、改善項目・修正項目がございましたらご指摘いただけたら幸いです。
* 技術コンサルティングをご希望の場合は下記を参照ください。
【 電気自動車車両制御ロジック開発のコンサルティング依頼ページ 】
海外にも対応します
Copyright – Seiji Nakamura, 2021 All Rights Reserved.