2020/8/16 (更新日:2023/9/13)
電気自動車を作るために電気自動車の制御ロジック(モデル化)の設計手順を説明します。
電動搬送車・電動車椅子・電気自動車を作りたい人に向けて
電気自動車の動きと制御との基本的な関係が分かっていないと思いませんか?
ドライバーの指令をタイヤの駆動力に変えていく過程をブレークダウンすることで、基本的な電気自動車の制御ロジック(モデル化)の設計手順を理解していきます。
コラム
- 第1話:電気自動車の性能曲線を決めよう【モータ出力を設計する為に】
- 第2話:電気自動車の電気部品を設計します【主要電気部品の仕様】
- 第3話:電気自動車を制御する仕組みを定義します【モデル化の準備】
- 第4話:電気自動車の制御ロジック(モデル化)の設計手順:今回説明
- 第5話:電気自動車の制御をモデル化してシミュレーション評価
この記事を書いている私は、MATLAB/simulinkを使って車両&車両制御モデルを構築し動作のシミュレーションを業務でおこなっていた経験があります。
電気自動車制御の比較的簡易な1つの方法・手順を理解できます。
実際の電気自動車制御に活用できますし、同じ手法で他の制御ロジックを構築する時に応用が出来るようになります。
電気自動車を作るために電気自動車の制御ロジック(モデル化)の設計手順を説明します。
電気自動車の制御の基礎
1.電気自動車の走る・止まるの制御の仕組み
電気自動車は、車両制御ECU部分で電機駆動システムを制御することで駆動力を発生し動きます。下の図中に示した車両制御ECUの中身を考えていきます。
*入出力の信号については説明はしませんが名称からご理解ください。
また、仮の値が書かれている場合が有りますが、sample値です。
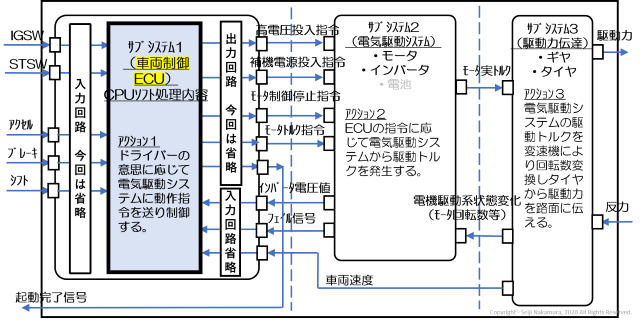
車両制御ECUでは、“車が動く”を制御する【走行制御】と、“車が動く”為に安全に電源系を準備したり遮断したりする【起動・停止シーケンス】の2つの制御状態から成り立っていると考えます。
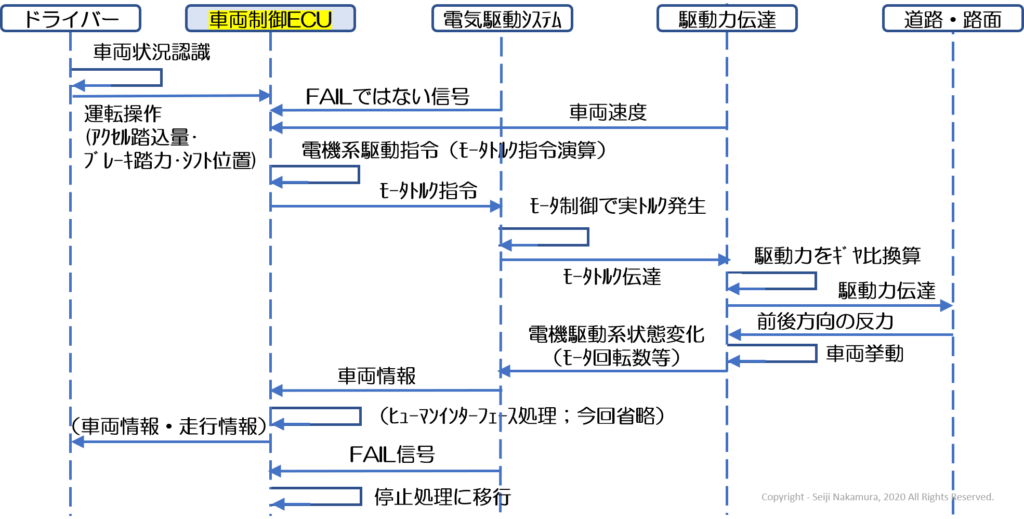
2.電気自動車の走行制御
“車が動く”のシーケンスは下の様に表せます。ドライバーの運転操作に基づいて演算したモータートルク指令を、車両制御ECUから出力します。モータートルクは駆動力となって道路に伝達されて車両が動きます。
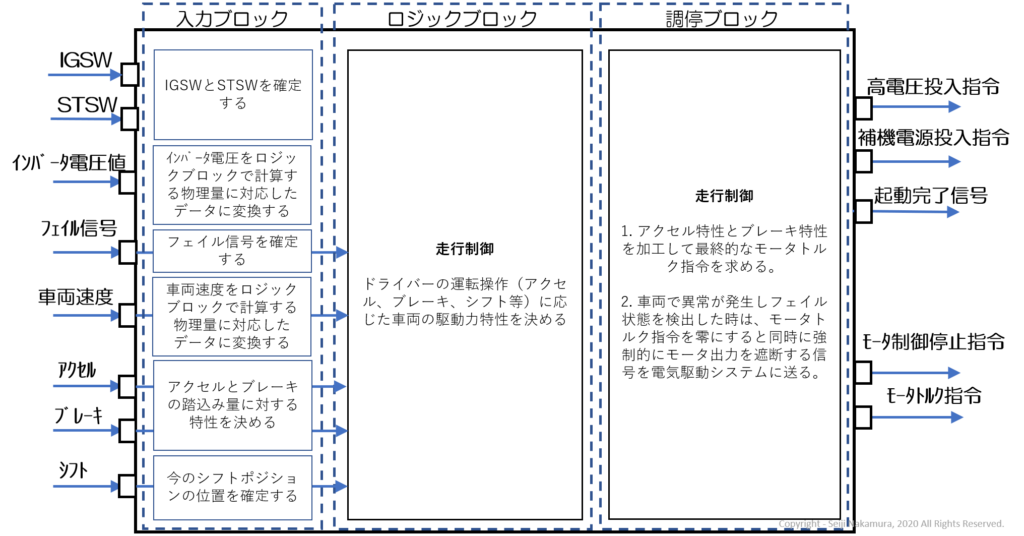
(1)走行制御をブロック図で表現します。
仕様が違う車両にも、仕様変更・追加にも対応しやすくする為、極力単純化するのに主眼を置いて3つのブロックで構成するブロック図を作成しました。ECU処理能力に余裕があることを前提に、汎用性を優先した開発方法を選んでいます。
- 【入力ブロック】入力信号の変換をおこなう、
- 【ロジックブロック】入力信号に対する特性を定義する、
- 【調停ブロック】ドライバーが指令している内容に適合するように出力を調整する
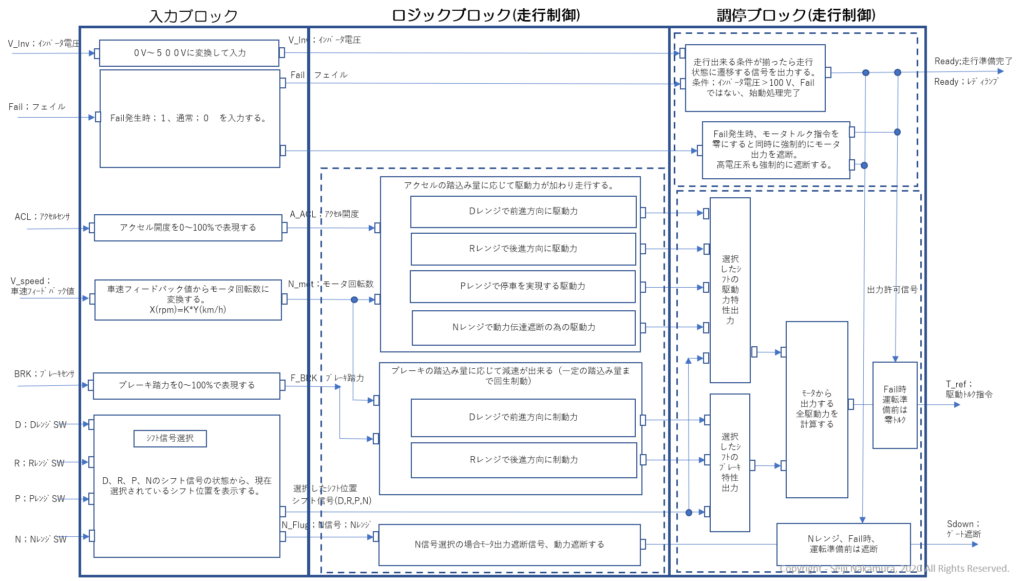
(2)走行制御のブレークダウン
走行制御が成立するようにブロック間の関係を明らかにしつつ、制御内容をブレークダウンして表現します。
ドライーバーのアクセル・シフトなどの運転操作に対応して、モータートルク特性を選択し制御します。
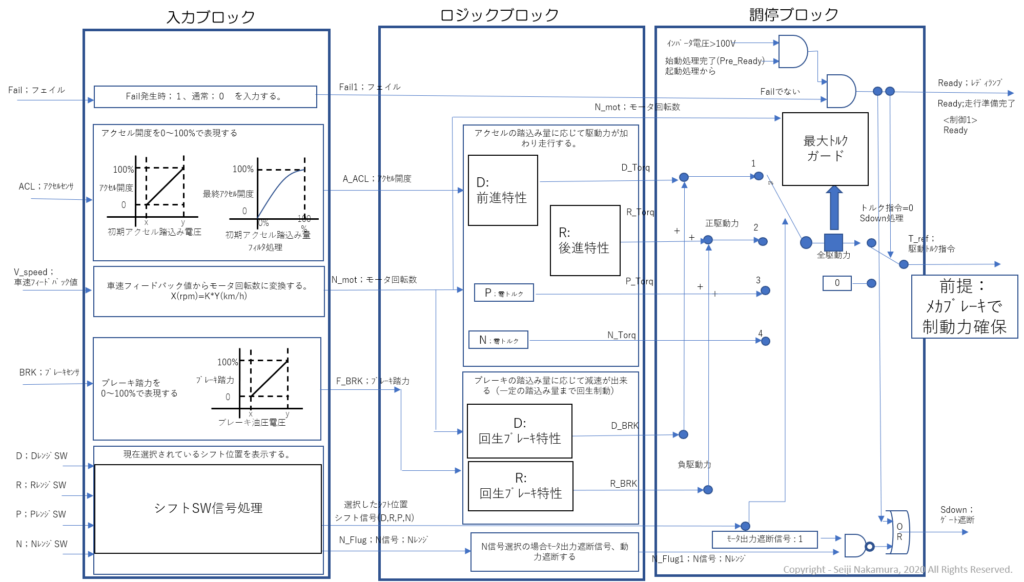
(3)シミュレーションモデル化レベルのブロック表現
モデル化する為に、実際の特性やロジックで表現します。特性図の部分をそれぞれの車両に合わせて変更すれば制御が完成する構成にしています。
車種変更などによる仕様の入れ替えに対応し易く汎用性が有ります。
CPU処理能力が高いシステムに適した手法です。
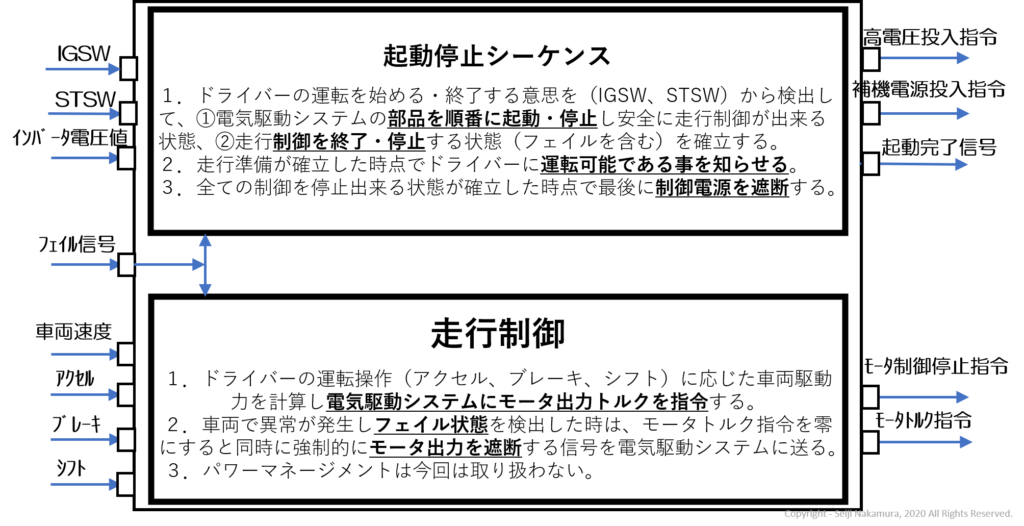
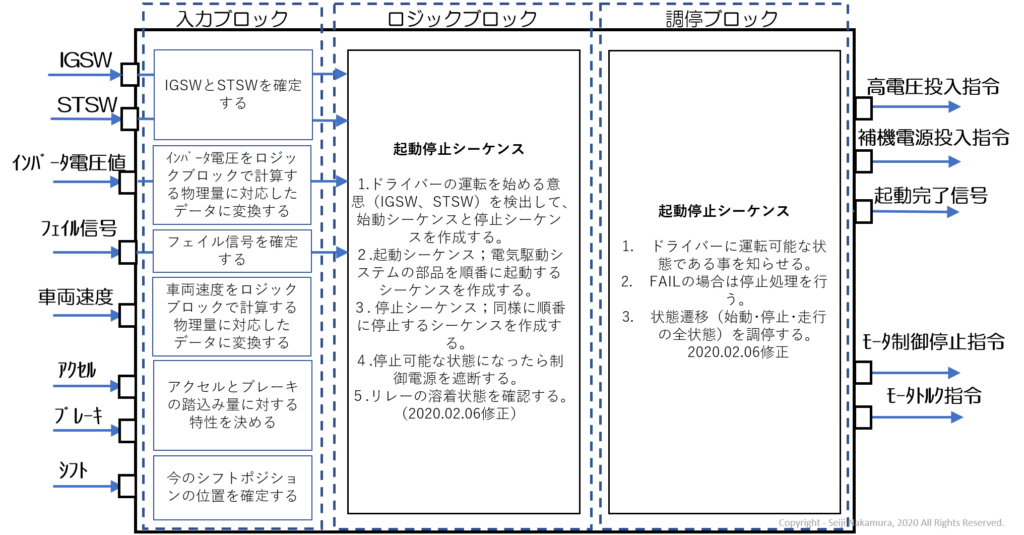
3.電気自動車の起動・停止の制御
起動・停止ロジック部分も同様な考え方で、【入力ブロック】【ロジックブロック】【調停ブロック】で表現します。
そして、起動・停止シーケンスを定義すると下記のようになります。
ドライバーの運転操作に応じて、電源系のリレーなどのON/OFFをシーケンス制御する役割の部分です。
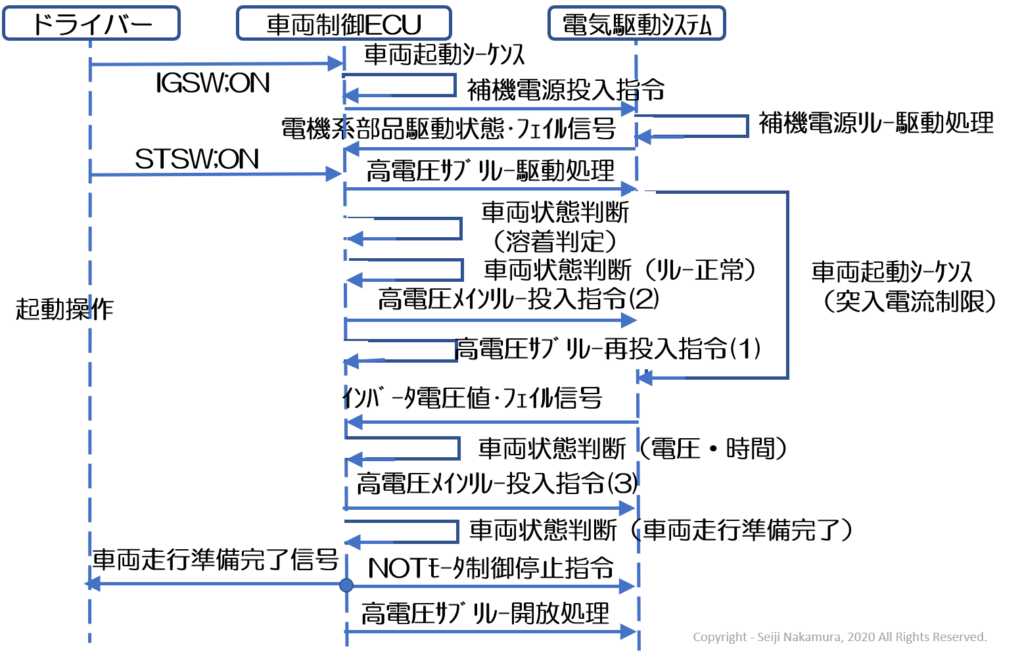
(1)起動シーケンス
ドライバーのキー操作をきっかけに電源系をシーケンシャルに投入することで、車両が走行できる状態を確保します。
高電圧の為、突入電流を避けるように順番にリレーを接続しています。
シーケンスとタイミングチャートで表すと以下のようになります。
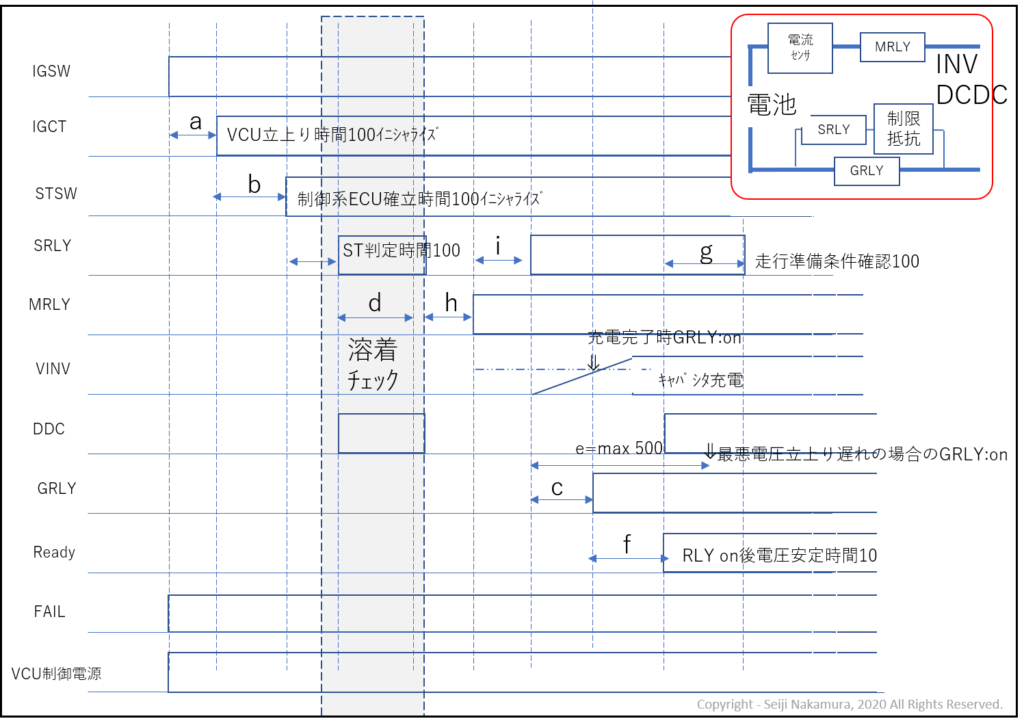
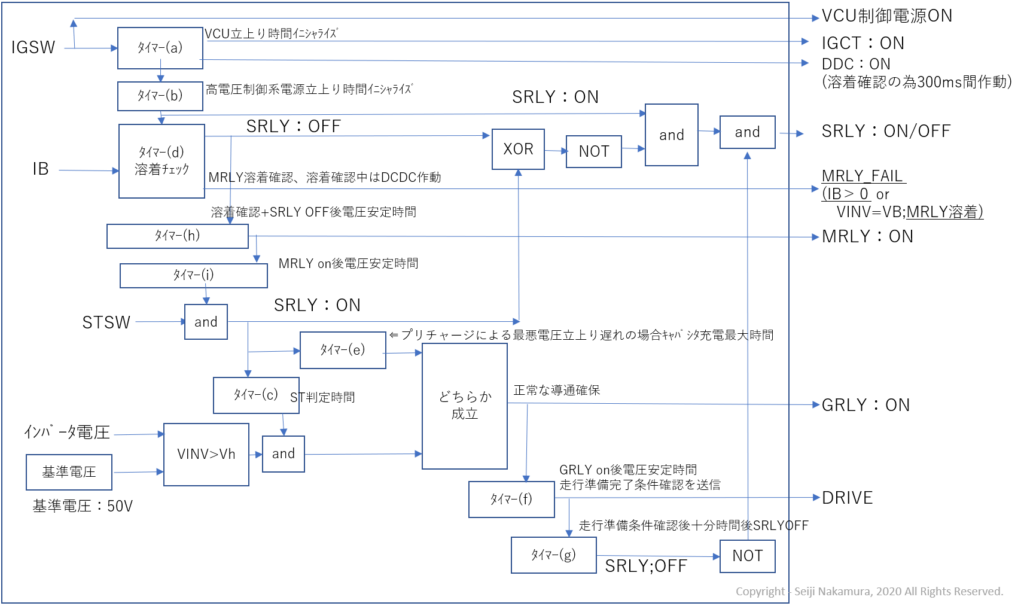
最終的にまとめるてブロック図で表現します。
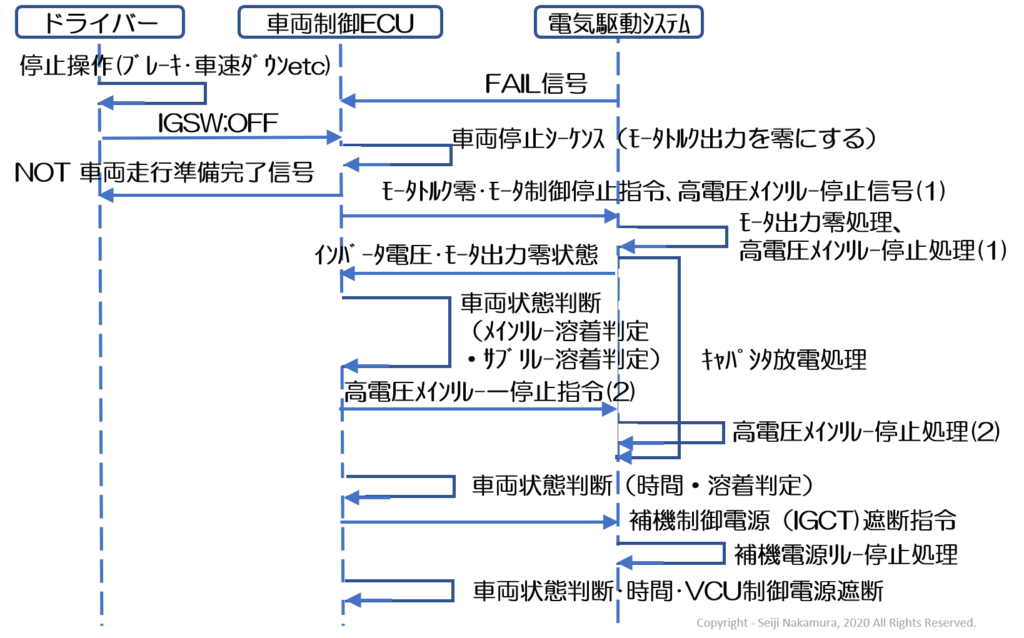
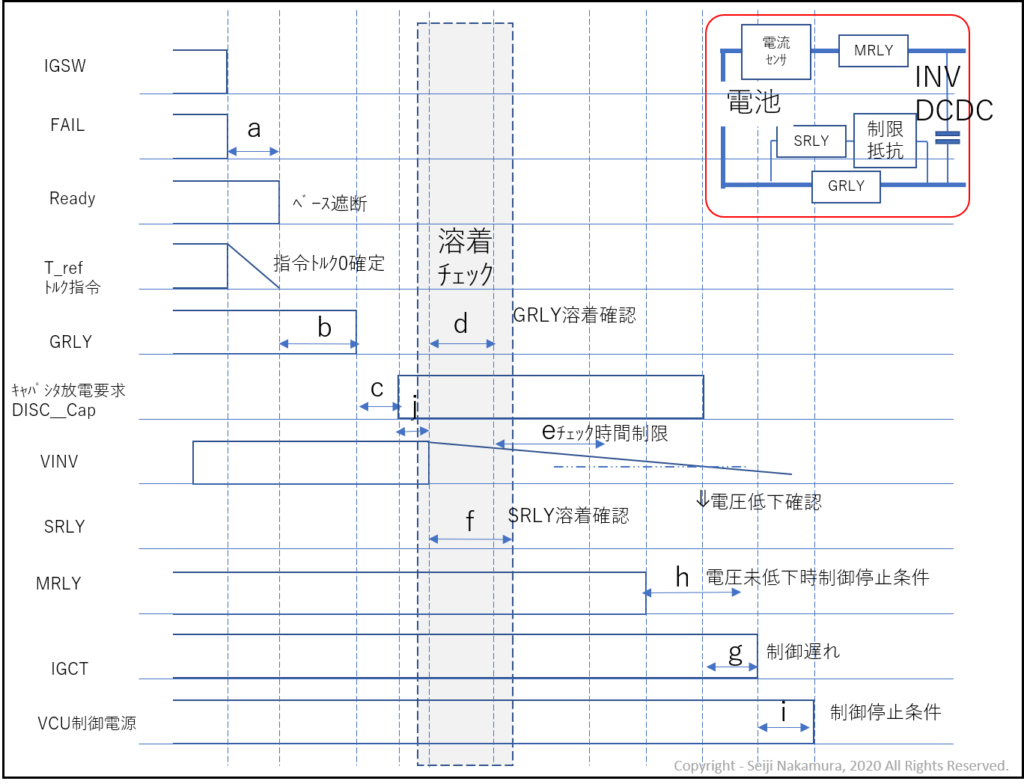
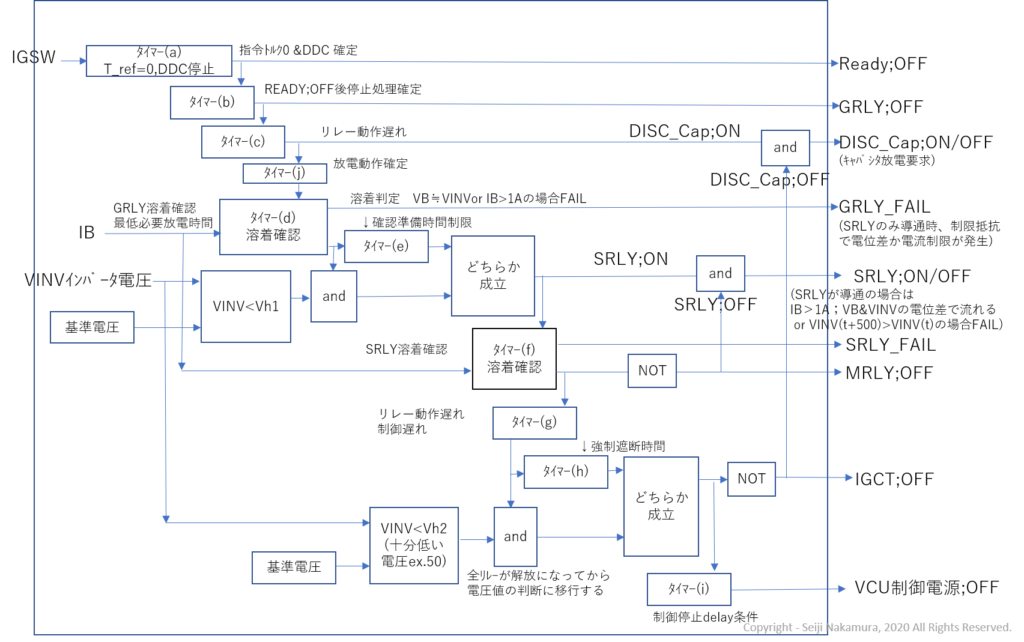
(2)停止シーケンス
ドライバーのキー操作をきっかけに、リレーを順番に遮断することで車両を安全に停車させるシーケンス制御をおこないます。
シーケンスとタイミングチャートで表すと以下のようになります。
最終的にまとめてブロック図で表現します。
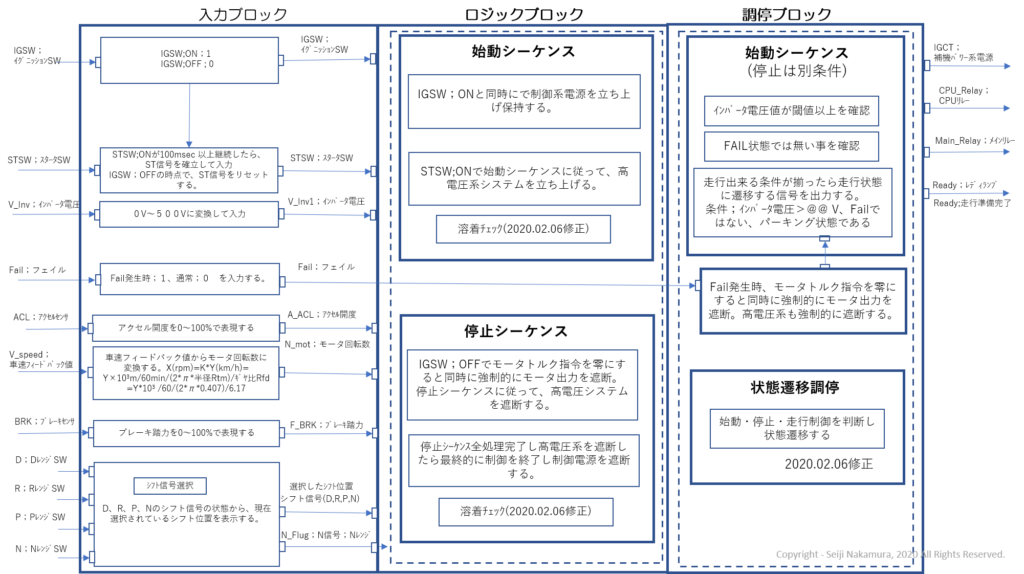
4.電気自動車の制御まとめ
【始動】【停止】【走行】の部分に今までの検討結果を挿入すると、車両制御ロジックの全体ブロックが完成します。
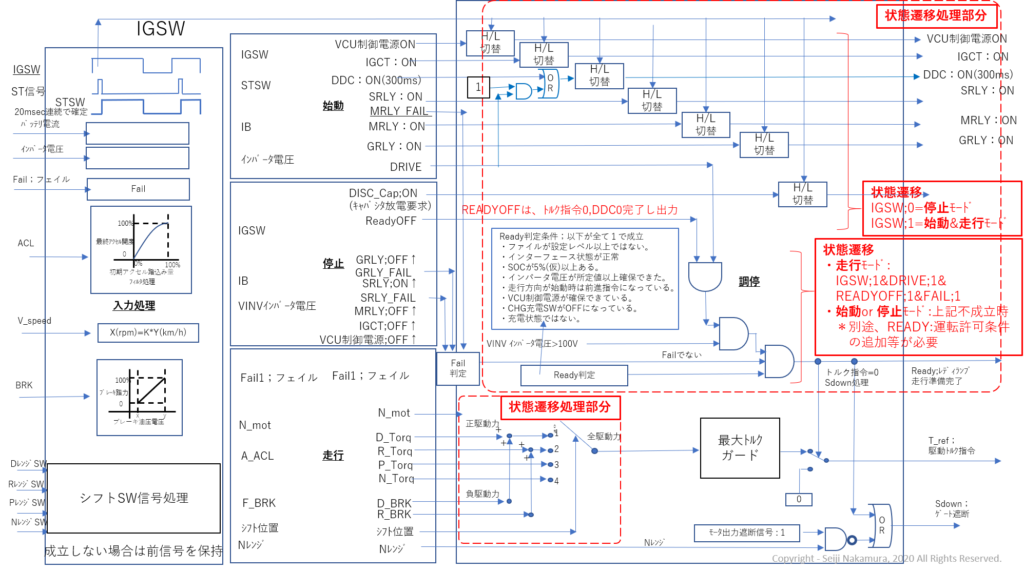
モデルベース開発(MBD)をする場合、Matlab/Simulink上にブロック図を作成します。
今まで説明してきた手順で Matlab/Simulink にモデルを作成するために、最低限理解が必要な内容があります。
一つ一つ着実に理解していくしかないのですが、最短で理解できる書籍を紹介します。
自動車をテーマにMatlab/Simulinkをつかったブロック図の作成手順を説明した入門書です。
初心者がとっつきにくい内容を具体的な事例を使って一から親切に説明しています。
筆者もお世話になりました。
![自動車業界MBDエンジニアのためのSimulink入門【電子書籍】[ 久保孝行 ]](https://thumbnail.image.rakuten.co.jp/@0_mall/rakutenkobo-ebooks/cabinet/6206/2000004096206.jpg?_ex=128x128)
<参考>
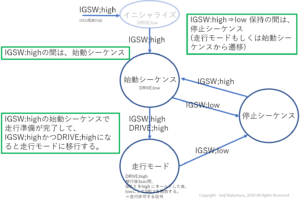
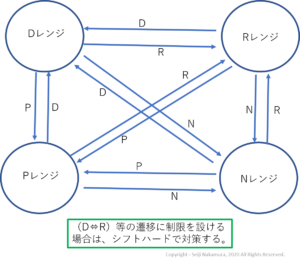
理解のために、走行モード・起動停止シーケンスの状態遷移図と、前進・後進などの走行モードの状態遷移図を下に示します。
参考にしてください。
最後に
電気自動車の車両制御ロジックに関して説明してきました。少しでも実務の参考になれば幸いです。
今回の制御ロジックはシミュレーションで検証はしていますが、使用する目的によりそのままでは使用できない場合があるので、ベンチなどで問題がないことを確認してから実車に搭載する様にお願いします。
*最後まで読んでいただきありがとうございます。
舌足らずで説明不足の所はお許しください。
また、改善項目・修正項目がございましたら、ご指摘いただけたら幸いです。
* 技術コンサルティングをご希望の場合は下記を参照ください。
【 電気自動車車両制御ロジック開発のコンサルティング依頼ページ 】
海外にも対応します
Copyright – Seiji Nakamura, 2021 All Rights Reserved.