2020/8/31 (更新日:2023/9/13)
電気自動車を作るために電気自動車の制御をモデル化して車両の動作をシミュレーション評価します。

■電動搬送車・電動車椅子・電気自動車を作りたい人に向けて
試作をする前に制御の間違いを直して、部品の作り直しを減らし開発時間を短縮したいですね。
PCで動作をシミュレーションで評価するのは知っているけど、具体的にやり方・手順まではわかりません。
今まで説明してきたブロック(車両制御ECU、電池、モータインバータ、車両)をモデル化します。
モデルを使って電気自動車の制御をシミュレーションをして検証結果まで示します。
■コラム
- 第1話:電気自動車の性能曲線を決めよう【モータ出力を設計する為に】
- 第2話:電気自動車の電気部品を設計します【主要電気部品の仕様】
- 第3話:電気自動車を制御する仕組みを定義します【モデル化の準備】
- 第4話:電気自動車の制御ロジック(モデル化)の設計手順
- 第5話:電気自動車の制御をモデル化してシミュレーション評価:今回説明
説明している私は、業務でMATLAB/simulinkを使って車両制御モデルを構築し制御のシミュレーションをおこなった経験があります。
電気自動車の制御をシミュレーションして検証する手順が理解できます。
そして自ら、今回構築した評価システムを使いシミュレーションによる制御ロジックの検証ができるようになります。
電気自動車を作るために電気自動車の制御をモデル化して車両の動作をシミュレーション評価します。
電気自動車の制御をシミュレーションする為にモデル化
前提:走る・止まるに限定した前後方向の加減速のシミュレーションモデル。
曲がるはハンドル操作の為、今回の対象外としています。

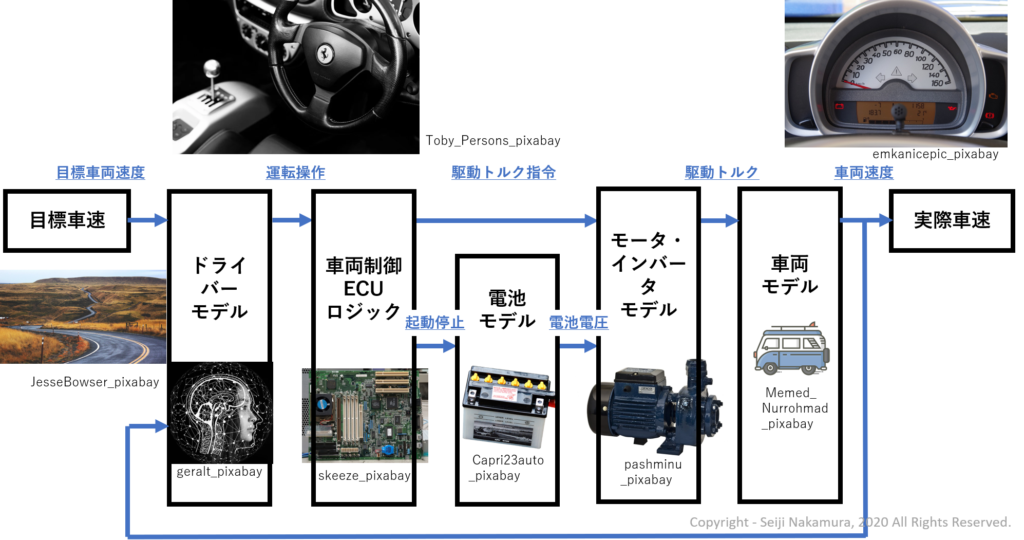
1.シミュレーションする為に制御システムをモデル化:全体
(1)ドライバーモデル:道路の状況に応じてドライバーは、起動停止・走行の判断をします。目標の車速になるようにシフト操作・アクセル・ブレーキ操作を行います。
(2)車両制御ECUロジック:電気自動車のセンサー情報を取込み、目標の車両速度になるように、モーター等のアクチュエータ類を制御します。
(3)電池モデル・モータ・インバータモデル:アクチュエータモデル
(4)車両モデル:走行時の車両特性を物理的に表現して、車両挙動を再現します。
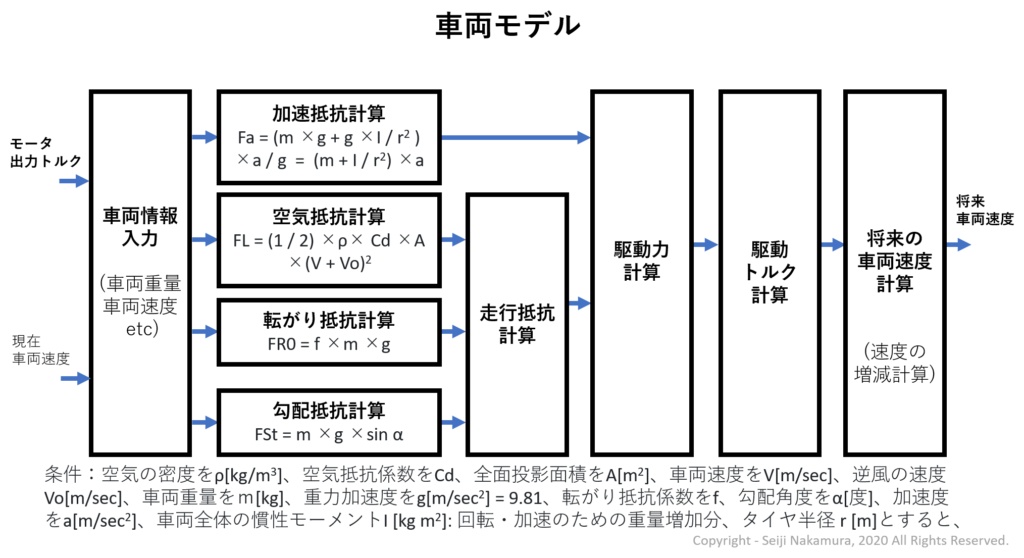
2.電気自動車の車両をモデル化:個別
走るのを邪魔する力Fr(車両走行抵抗)は、
空気が前面を抑えて車を止めようとする空気抵抗:FL、
タイヤと路面が接触することで生じる転がり抵抗:FR0、
斜面を登る時に重力が押し戻そうとする勾配抵抗:FSt、
車両を加速する為の慣性抵抗Faで成り立っています。
Fr(車両走行抵抗) = FL(空気抵抗) + FR0(転がり抵抗) + FSt(勾配抵抗) + Fa(加速抵抗)
モーター出力トルクが決まると、釣り合う車両速度が決まります。
参照:*電気自動車のモータ出力を設計します【電池・インバータも決める為】
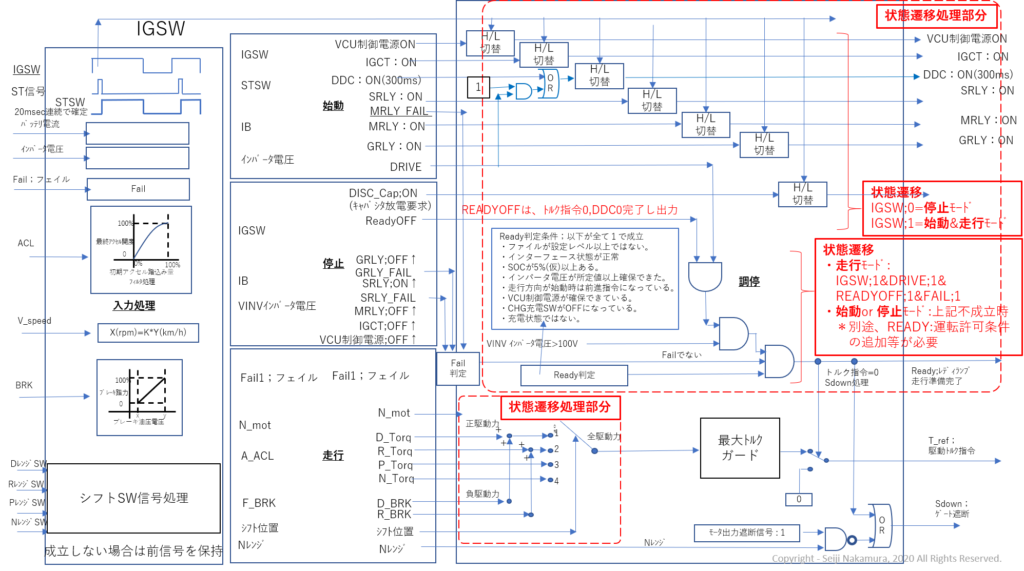
3.電気自動車の制御ロジックのモデル化:個別
車両の制御ロジックをモデルで表現したブロックです。ドライバー操作をシフトセンサー・アクセルセンサー等で検出します。
目標の車両速度になるようにモータなどのアクチュエーターを制御します。
4.電気自動車を運転するドライバーをモデル化:個別
道路状況からドライバーはシフトポジション、アクセル、ブレーキなどを操作します。
今回走行に関しては、目標車両速度と現在の車両速度の差に応じて比例制御・積分制御することでドライバーの操作をモデル化しています。

5.電池、モータインバータのモデル化:個別
アクチュエータの電池とモータ・インバータは必要に応じて詳細にモデル化します。
今回は車両制御ロジックの検証が目的なので、指令値と同等な値がアクチュエータから出力出来るとしています。
電気自動車の制御をMATLAB / Simulinkのシミュレーションで評価した結果
電気自動車の車両制御ロジックを数式モデルで検証・修正し完成度を向上させた後に実機を試作することは、実機で修正するのに比べ時間も開発費も大幅な削減になります。
数式モデルで検証 するには、今まで作成してきた車両モデル、車両制御ロジックなどをMatlab/Simulinkのシステムを構成するのが必要です。
この部分に関しては、自動車技術の特化して初心者にもわかり易く説明している入門書を紹介しておきます。
車両制御ロジック・車両モデル・電機駆動モデル・ドライバモデルをどのようにMatlab/Simulinkで表現するか、懇切丁寧に説明してるので手にとって勉強してみてください。
![自動車業界MBDエンジニアのためのSimulink入門【電子書籍】[ 久保孝行 ]](https://thumbnail.image.rakuten.co.jp/@0_mall/rakutenkobo-ebooks/cabinet/6206/2000004096206.jpg?_ex=128x128)
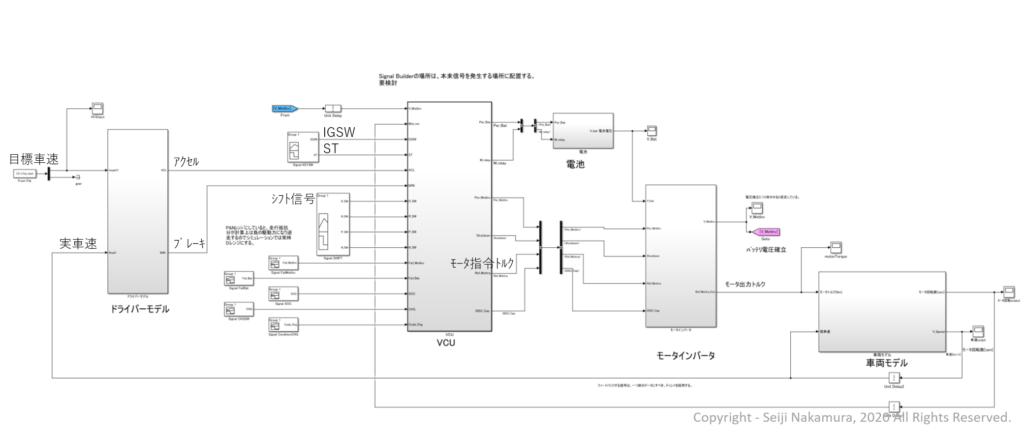
1.MATLAB / Simulinkの電気自動車のシミュレーションモデル
上述した通りにモデル化をおこないMatlab/Simulink で構築した電気自動車の車両制御ロジック評価システムは下記のようになりました。
今回は参考ですから、さらっと見てもらえば良いです。
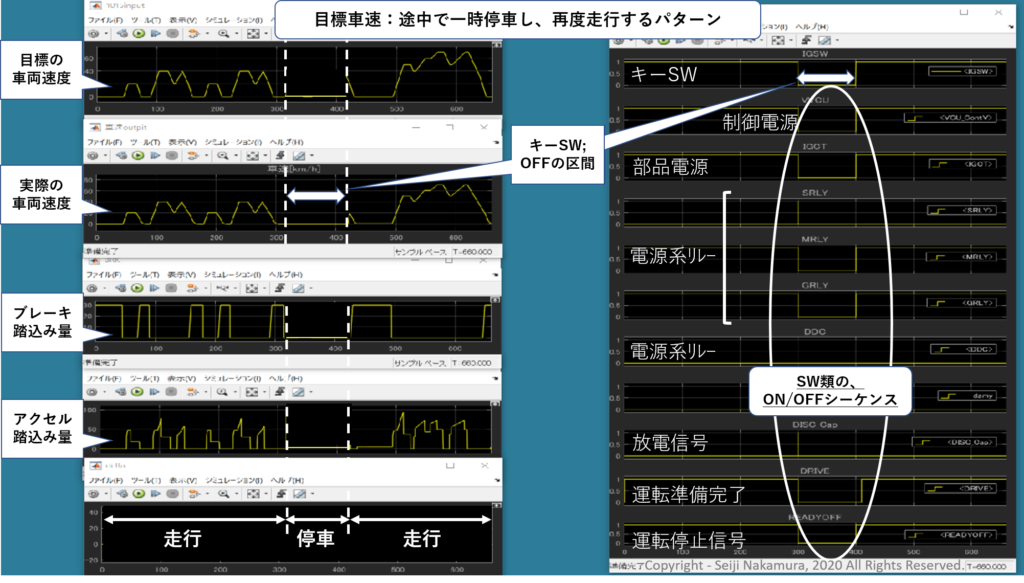
2.電気自動車のシミュレーションによる検証結果
実際に目標となる車両速度を設定してシミュレーションをおこなった結果を示します。
目標の車両速度を決めて走行を始め、途中で一定期間キーSWをOFFにして車両を停止し、再度走行するパターンです。
目標の車両速度に対して、実際の車両速度が追従していることが分かります。
ブレーキ踏込み量、アクセル踏込み量、SW類のON/OFFシーケンスも期待の挙動を示しています。
3.検証した後実車に組み込むには
今回は机上での検証までを説明しました。
次の段階では、実車を制御することになります。
そのためには、検証した車両制御ロジックをコントロールユニットに組み込む必要があります。
その手順を説明した本を紹介しますので必要に応じ参照してください。
検証した最終の車両制御ロジックをC言語などに変換して車両制御コントローラに組み込みます。
インターフェースを記述している周辺のC言語にMBDで開発した内容をどのように組み込むかを丁寧に説明しています。
![MATLABによる組み込みプログラミング入門 SimulinkとReal-Time Worksh (計測・制御シリーズ) [ 大川善邦 ]](https://thumbnail.image.rakuten.co.jp/@0_mall/book/cabinet/7898/78983717.jpg?_ex=128x128)
最後に
電気自動車の制御ロジックをMatlab/Simulinkを使用してシミュレーションで検証する手順を説明しました。
実際に自身でシミュレーション評価した結果、目標の制御を実現したことが検証出来ました。
少しでも実務の参考になればと説明してきました。
皆様の業務に活用していってくださることを切に望みます。
*最後まで読んでいただきありがとうございます。
舌足らずで説明不足の所はお許しください。
また、改良項目・修正項目がございましたらご指摘いただけたら幸いです。
* 技術コンサルティングをご希望の場合は下記を参照ください。
【 電気自動車車両制御ロジック開発のコンサルティング依頼ページ 】
海外にも対応します
Copyright – Seiji Nakamura, 2021 All Rights Reserved.