2021/7/15 (更新日:2023/9/13)
自動車制御をモデルベース開発するときの全体のフローを電気自動車の事例で一からご説明します。【初心者でもわかる】

自動車制御のモデルベース開発:MBDはどのようにしたらいいかわかりますか?
電気自動車の事例で自動車制御を一から実現する手順をご説明します。
はじめに制御と制御システムの要求仕様を明確にします。
次に制御ロジックを組み立てる手順を説明します。
最後にMatlab/Simulinkを使ったモデルベース開発の進め方を説明します。
シミュレーション評価で基本動作は確認してあります。
今回のまとめた内容を使って実際に市場で走る電気自動車を開発してください。
電気自動車の開発を担当していた経験から説明していきます。
実際の手順に興味がある方は、【2.自動車制御の基本・・・】からお読みください。
目次
1. 自動車制御をモデルベース開発するときの全体のフローを電気自動車の事例で一からご説明します。
2. 自動車制御の基本となる自動車の性能目標を決める。
3. 制御対象の電気自動車の事例で制御システムを明確にしてモータ出力の目標値を決めます。
4. 電気自動車を希望通りに動かすために自動車制御の要求仕様を明確にする。
5. 電気自動車の制御仕様を実現する自動車制御のロジックを作成する。
6. 電気自動車制御のモデルベース開発
7. まとめ
1. 自動車制御をモデルベース開発するときの全体のフローを電気自動車の事例で一からご説明します。
1-1. 自動車制御のモデルベース開発の基本

近年の自動車制御は
上図のように「制御ロジック」と「制御対象:自動車」の2つの要素で成り立ちます。
●制御対象の自動車は、
制御ロジックを組み立てることで最大限の性能を引き出されます。
●制御ロジックは、
制御対象の特性を十分に把握できて思い通りに動かすことができます。
課題は、
自動車は多くの部品から成り立っていて大規模なシステムです。
制御開発に失敗するとやり直しに多くの時間と予算がかかります。
「 モデルベース開発 」
コンピュータ上にシステムを構築し挙動をシミュレーションすることで、
完成物がなくても制御対象・制御ロジックの完成度を上げる開発手法。
シミュレーションでバグが無くなってから実際の制作に着手します。
今回は電気自動車を事例に前後方向の速度制御のモデルベース開発を紹介します。
自動車の左右方向の制御はハンドルでコントロールされるので扱いません。
1-2. 電気自動車のモデルベース開発の流れ
モデルベース開発では、
制御対象:自動車と制御ロジックをMatlab/Simulinkを使ってモデル化して解析します。
精度は解析内容に応じて詳しすぎない適当なレベルにします。
モデル化して机上で評価する前半の開発と、実際にECUに組み込み実車でおこなう後半の開発があります。
今回は、前半の開発についての説明です。
(1) 自動車の使われ方を予測して自動車の要求性能を決めます。
(2) 制御対象の電気システムを定義し制御の要求仕様を明確にします。
(3) 要求を解析し制御ロジックを組み立てます。
(4) 制御ロジック・制御対象などモデル化します。
(5) モデルでシミュレーション評価し制御ロジックの完成度を向上させます。
その後、実際に制御ECUに組み込み、後半の実車の開発に移行します。
2. 自動車制御の基本となる自動車の性能目標を決める。

制御開発に着手する前に対象の自動車の使われ方を考え性能目標を決めます。
一般道・高速道路で走る場合に交通の流れを妨げずに走れる性能が必要です。
実際の走行データから
①最高速度・加速性能を決めます。
②どれだけの急な坂路で走れる必要があるか斜度も決める必要があります。
③前進だけでなく後進についても要求性能を決めます。
④走行距離と電池充電時間を決めます。
(電池容量は電気自動車の商品性を左右する要因になります)
⑤最後に電気自動車の基本諸元を決めます。

性能目標の詳細は、こちらを参照
3. 制御対象の電気自動車の事例で制御システムを明確にしてモータ出力の目標値を決めます。
車両の目標性能が決まった後、電気自動車の前後方向の速度を制御するモータの目標性能に変える必要があります。
モータ出力の目標性能を算出できれば、その値を満たすように電気システムを組み立てられます。
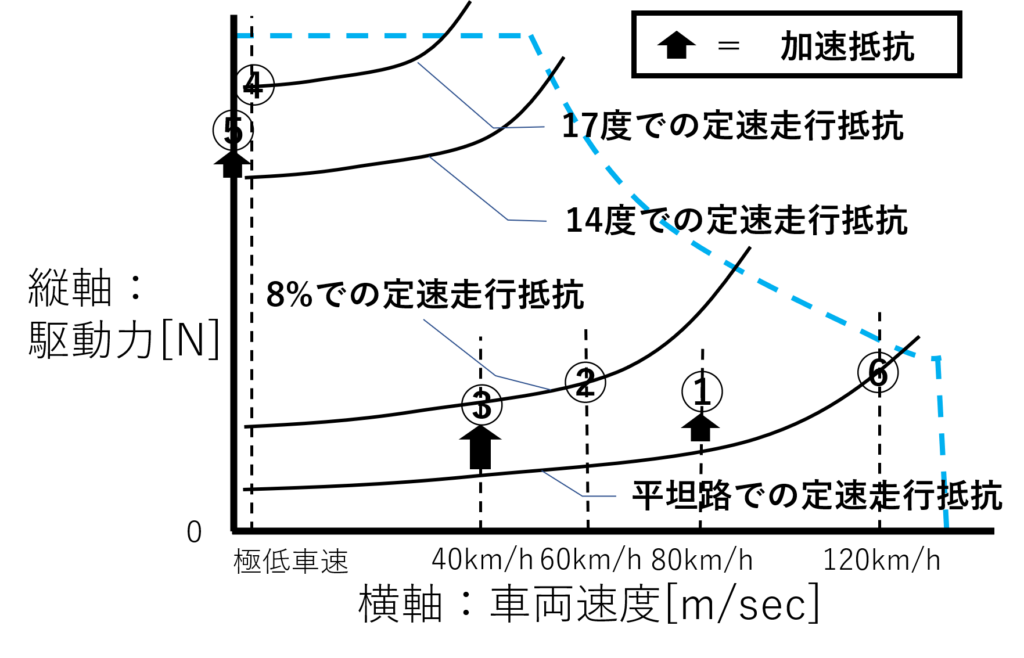
はじめに、自動車の駆動力を走行するときの車両走行抵抗の釣り合い式から求めます。
車両走行抵抗 = 空気抵抗 + 転がり抵抗 + 勾配抵抗 + 加速抵抗
*一般的な釣り合い式なので下の技術書で確認してください。
上式から自動車の駆動力を求めます。
自動車の駆動軸の性能目標の動作点を上図に表しました。
上図から、モータ出力の目標性能に変換をします。

モータ出力の求め方の詳細は、こちらを参照
4. 電気自動車を希望通りに動かすために自動車制御の要求仕様を明確にする。
電気自動車の要求の性能を決めた後、すぐに制御ロジックを作成するのはやり直しの原因になります。
電気自動車全体のシステムから、駆動力の伝わり方を軸に自動車の要求仕様を作ります。
入力がドライバーの運転挙動、出力がタイヤの駆動力です。
タイヤの力で道路からタイヤへの反力が生じて電気自動車が動きます。
力のバランスから車両全体のシーケンス図とブロック図を徐々にブレークダウンしました。
①ドライバーが運転席に座りシステムを起動するシーケンスを考えます。
②ドライバーがアクセルを踏み込み生じる駆動力のバランスを解析します。
③ドライバーがブレーキを踏み車両が停車します。
④最後にドライバーがシステムを停止するシーケンスを考えます。
解析の結果、
【車両制御ECU】【電気システム】【車両の機械系駆動力伝達部分】
の関係が明確になります。
【車両制御ECU】のブロック図とシーケンス図が特定できます。
また、入出力信号もここで定義されます。
これが、車両制御の要求仕様になります。
*車両制御の要求仕様を導くために、
モデルベースシステムエンジニアリング:MBSEの手法
を理解できる範囲で応用しています。

車両要求仕様の作り方詳細は、こちらを参照
5. 電気自動車の制御仕様を実現する自動車制御のロジックを作成する。
車両システムの中の車両制御ECUについて解析していきます。
車両制御ECUの制御ロジックの要求仕様をモデル化できるまでブレークダウンします。
①電気自動車の走行制御、
②電気自動車電気系の起動停止シーケンス、
のブロックに分けて考えます。
制御ロジックを作成してMatlab/Simulinkでモデル化につなげます。
5-1. 走行制御の内容
まずアクセル/ブレーキと車両の情報などを入力します。
車両速度に応じて必要な駆動力演算し出力するモータ指令値を電気システムに指令します。
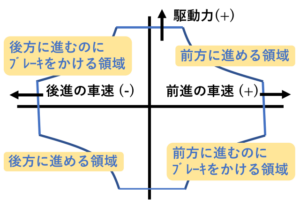
モータ指令値は、シフト信号、アクセル/ブレーキ信号に応じ演算します。
【縦軸:駆動力】【横軸:車両速度】の4象限上でモータトルクが指令され、前進/後進、駆動/制動を実現します。
最後にシーケンスをブロックで表現します。
5-2. 起動停止シーケンスの内容
ドライバの運転の意思を示す信号【IGSW、シフト、アクセル/ブレーキなど】に応じて電気システムを作動/停止させます。
高電圧の電気システムのため、ソフトに電気の断続をすることで乗員の安全を確保します。
また最低限の安全上の検出機能も考慮しています。
最後に、①走行制御と②起動停止シーケンスをまとめてブロック図にまとめます。
車両制御ロジック内容の詳細は、こちらを参照
6. 電気自動車制御のモデルベース開発
検討してきた結果をすべて組み合わせることで、電気自動車の制御ロジックのシミュレーションを行い、思いどおりの挙動になっているか確認をします。
- 前後方向の速度制御のモデルベース開発 –
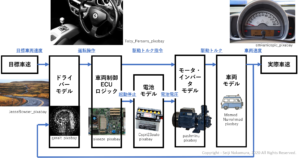
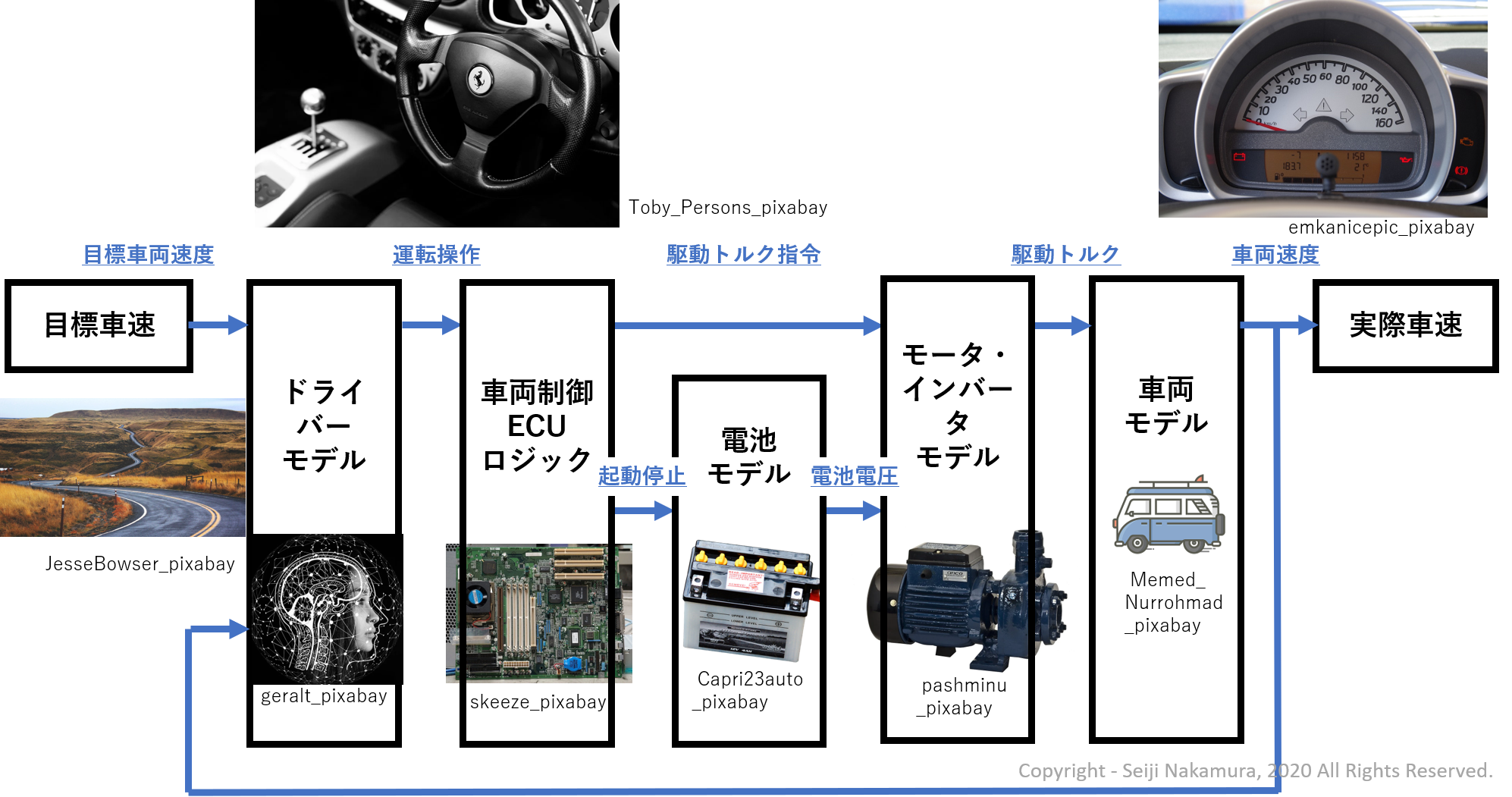
システム構成
①ドライバーモデル
②車両制御ロジック
③電池モデル
④モータ・インバータモデル
⑤車両モデル
シミュレーション内容
①目標車速を設定して、ドライバーモデルに入力
②ドライバーモデルで実車速と目標車速の差でアクセル量を出力
③車両制御ECUで必要駆動力を演算し駆動トルク指令を出力
④モーターインバータモデルを通して車両モデルに駆動トルクを出力
⑤車両モデルで車両状態から演算後の車速を出力=実際車速
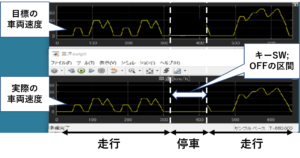
シミュレーション結果
目標の車両速度パターンと実際の車両速度を比較するとほぼ同じになっている。
走行の途中でキーOFFにして一時停車したときも車両動作は追従している。
シミュレーション評価で基本動作は確認できました。
モデルベース開発も前半の机上検討までは一通り完了できました。
この先は、制御ECUに組み込み、実車を作っていく段階になります。
そこは、ぜひ皆さんがトライしてみてください。

シミュレーション内容の詳細は、こちらを参照
7. まとめ
電気自動車のモデルベース開発の概要の手順を説明しました。
少しでも実務の参考になればと説明してきました。
皆様の業務に活用していってくださることを切に望みます。
*最後まで読んでいただきありがとうございます。
舌足らずで説明不足の所はお許しください。
また、改良項目・修正項目がございましたらご指摘いただけたら幸いです。
Copyright – Seiji Nakamura, 2021 All Rights Reserved.